 サーボモーターを2つ使った、2軸の電動雲台を。
サーボモーターを2つ使った、2軸の電動雲台を。
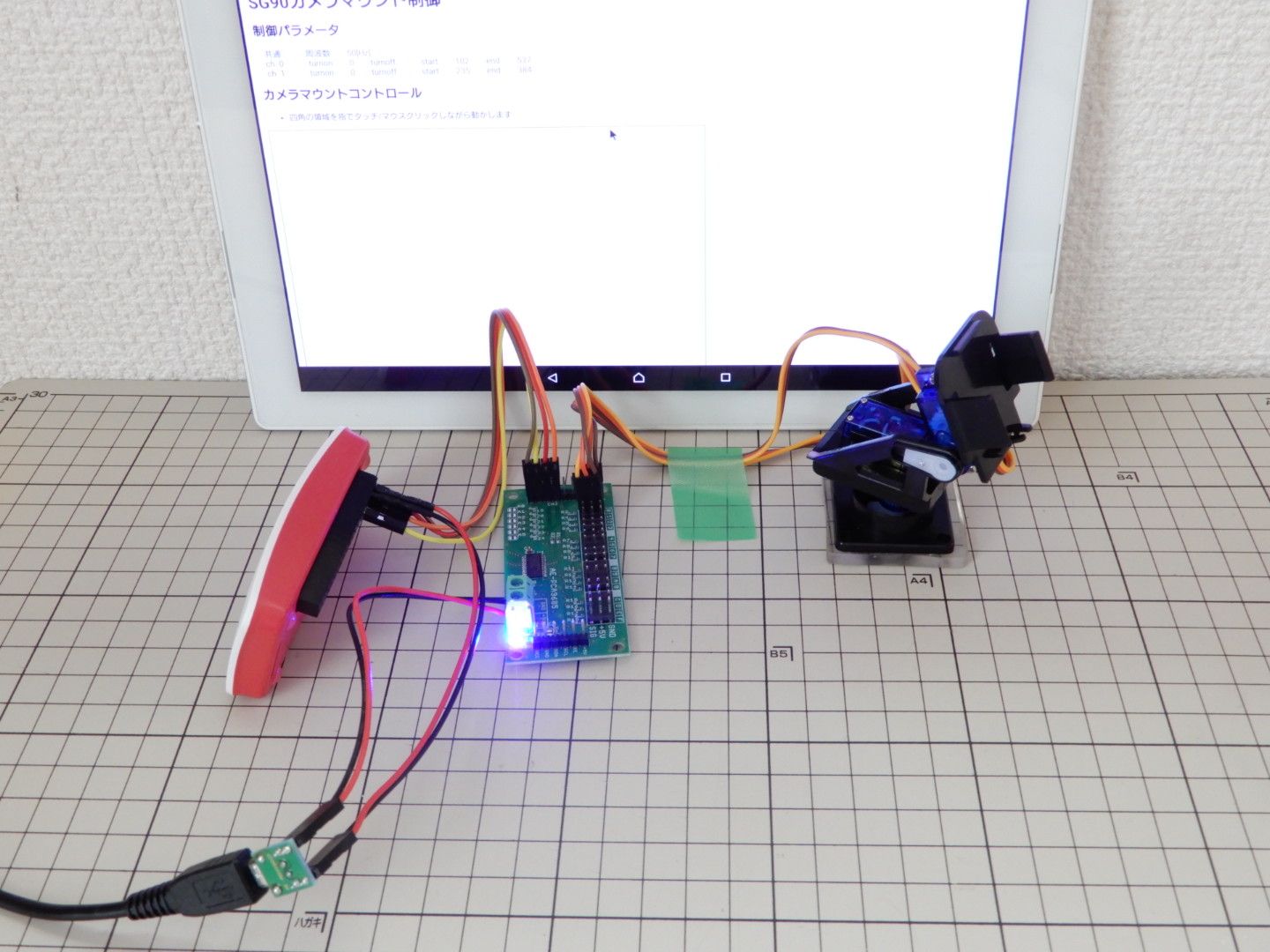
タブレットPCのWebブラウザから、上下左右(パン、チルト)ウニョウニョ操作してみました。四角いエリアでマウス操作すると、雲台を自由に動かすことができます。
サーボモーターの制御は、Raspberry Pi Zero WにPWM制御基板を取り付けて行いました。
このようなシステムの構築方法を記録しておきたいと思います。
Raspberry Piの2軸電動雲台制御システム構築手順
使用する機材
電動雲台
[amazonjs asin=”B00FHRVGN6″ locale=”JP” title=”SG90 Servo SG90サーボ用ミニ2軸 オリジナル FPV 特殊なナイロン PTZ(NOサーボ) カメラマウント A838″]サーボモーターSG90を2つ取り付け可能な雲台です。お値段がお手頃ですが、注文してから到着まで2週間くらいかかりました。
サーボモーター
[amazonjs asin=”B00VUJYNWG” locale=”JP” title=”デジタル・マイクロサーボ SG90 (5個)”]SG90を2つ購入し、取り付けてみました。同じサイズのサーボモーターは何種類かあり、よりトルクが高いモデルもあるようです。
Raspberry Pi本体
どのRaspberry Piでも大丈夫かと思います。OSはRaspbianを使用させて頂きました。[amazonjs asin=”B0746H9881″ locale=”JP” title=”Raspberry Pi Zero W Starter Kit”]ピンヘッダが無い、通常のRaspberry Pi Zero Wを購入し、基板の裏面にピンソケットを取り付けてみました。[amazonjs asin=”B0711MPHVF” locale=”JP” title=”GPIO Hammer Header”]ハンマーヘッダーは、叩いて取り付けられるため、はんだ付けは不要です。
Pi Zeroのオフィシャルケースにはカメラ取付用の変換ケーブルが付属しています。ピンヘッダを裏面に取り付けることで、GPIOと同時にオフィシャルケースのカメラ用のフタを使用することができます。
Raspberry Piを電動雲台に搭載することで、雲台の制御に加えて、カメラとしての役割、写真と動画の撮影に使用することができます。[amazonjs asin=”B01ER2SKFS” locale=”JP” title=”Raspberry Pi Camera Module V2 カメラモジュール (Daylight – element14)”]
PWM制御基板
[amazonjs asin=”B01D1D0CX2″ locale=”JP” title=”HiLetgo 2PCS PCA9685 16チャンネル 12-ビット PWM Servo モーター ドライバー IIC モジュール Arduinoに対応 ロボット”]I2CでRaspberry Piと接続可能なPCA9685コントローラーを使用しました。16チャンネルありますが、電動雲台用にチャンネルを2つ使用します。残りの14チャンネルは同じようにサーボモーターを取り付け可能のほか、LEDまたは赤外線LEDを取り付けることで、照明(または暗視カメラ用照明)として使用できそうです。
LED制御の記事はこちらになります。
ジャンパーワイヤー
[amazonjs asin=”B06Y48V9DL” locale=”JP” title=”ELEGOO 120pcs多色デュポンワイヤー、arduino用ワイヤ—ゲ—ジ28AWG オス-メス オス-オス メス –メス ブレッドボードジャンパーワイヤー”]モーター駆動用の電力系の配線と、I2Cの信号系の配線ともにジャンパーワイヤーを使用しました。メスーメスとオスーメスケーブルを端子に合わせて使用する感じです。
分岐用USB電源端子
モーターを駆動する場合、大きな電流が必要になります。Raspberry Pi経由で大きな電流が流れないように、USB電源を分岐しました。秋月電子通商さんのこちらの製品を使用させて頂きました。
そこそこの容量(5V 3A程度)のUSB電源をご用意頂ければ、少数のモーターを接続しても、電力不足の問題は発生しないかと思います。
配線図
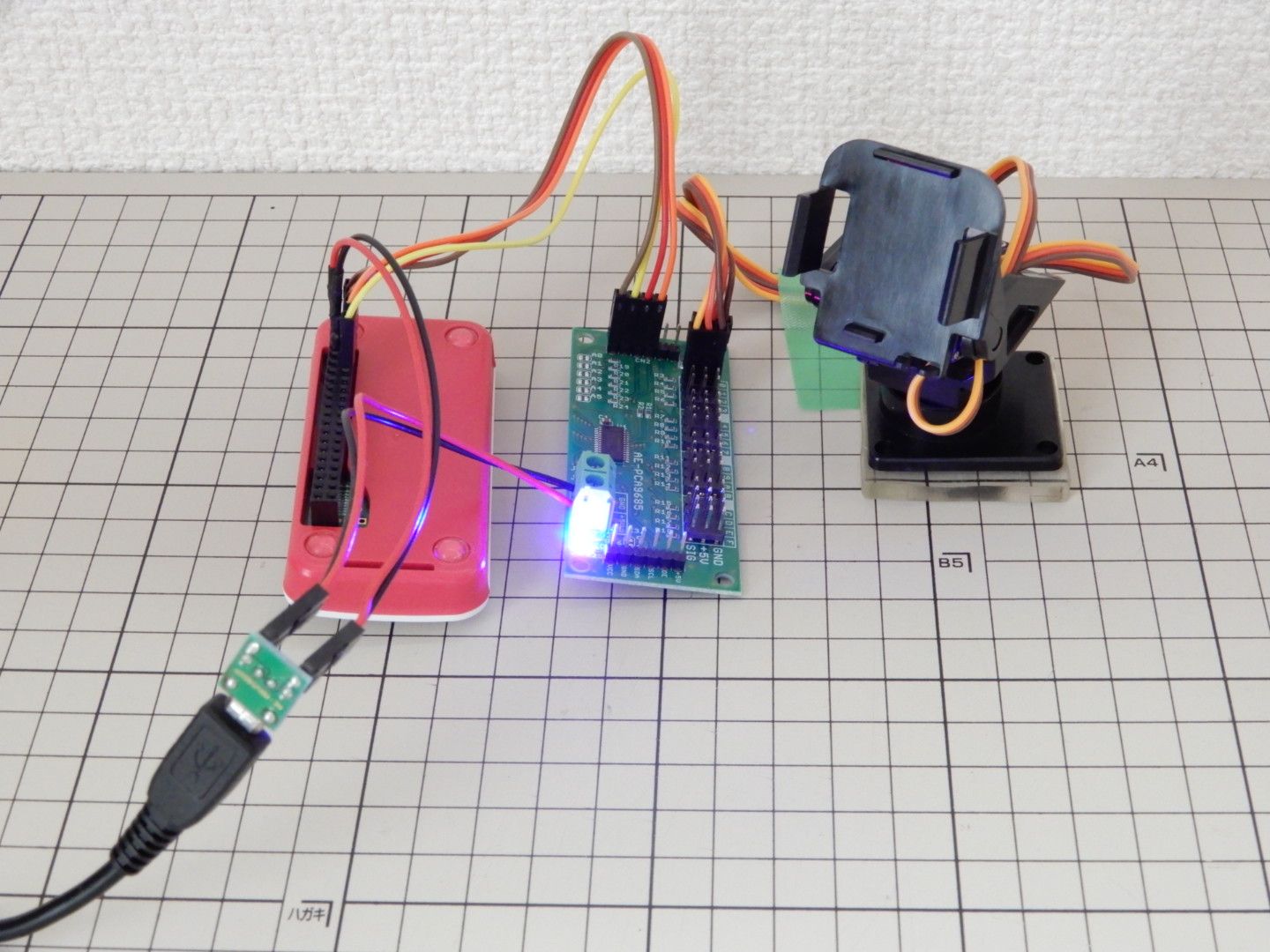
次のような3系統の配線になります。
- USB電源ケーブルを2つに分岐して、Raspberry PiとPWM制御基板の電源端子に接続。
- I2C端子でRaspberry PiとPWM制御基板を接続。
- サーボモーターを接続。
写真のPi Zeroは、基板の裏面にGPIOピンヘッダを取り付けたため、2列の端子の左右が逆になっています。通常の表面のGPIOヘッダの配線は以下になります。
電源配線
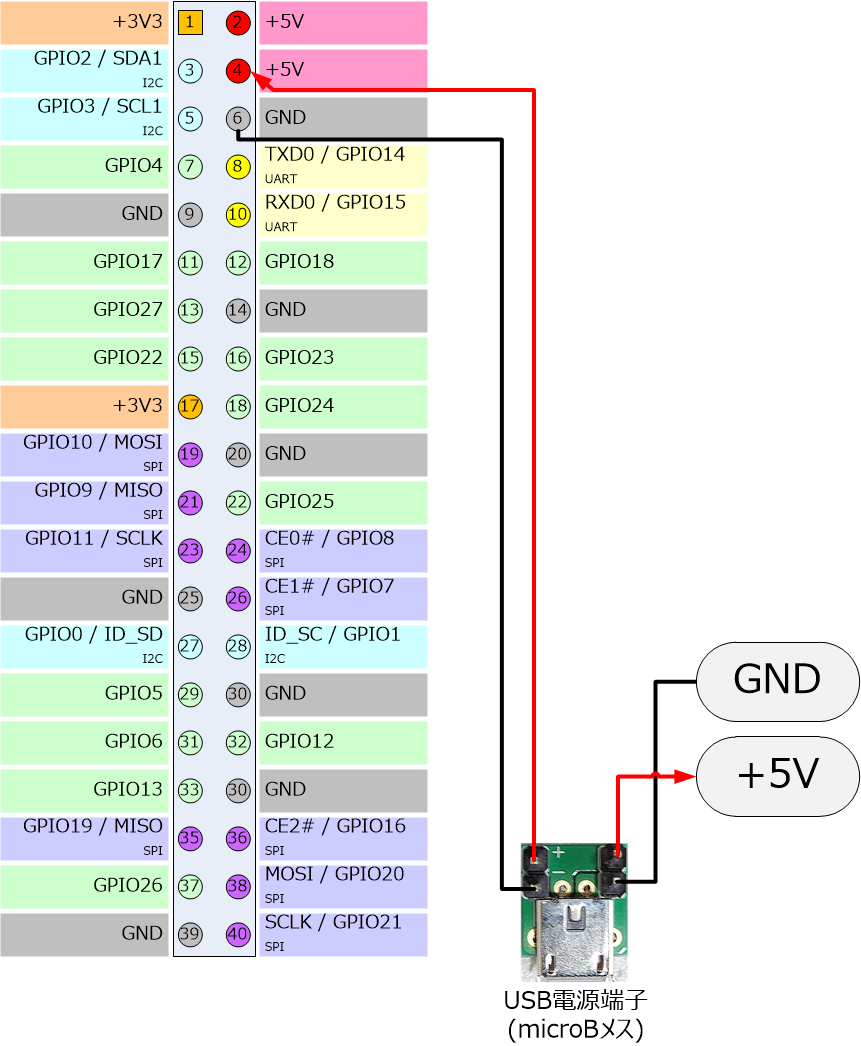 microB端子のUSB電源を2つに分けて、Raspberry PiのGPIOと、PWM制御基板の電源端子に接続しました。
microB端子のUSB電源を2つに分けて、Raspberry PiのGPIOと、PWM制御基板の電源端子に接続しました。
I2C配線
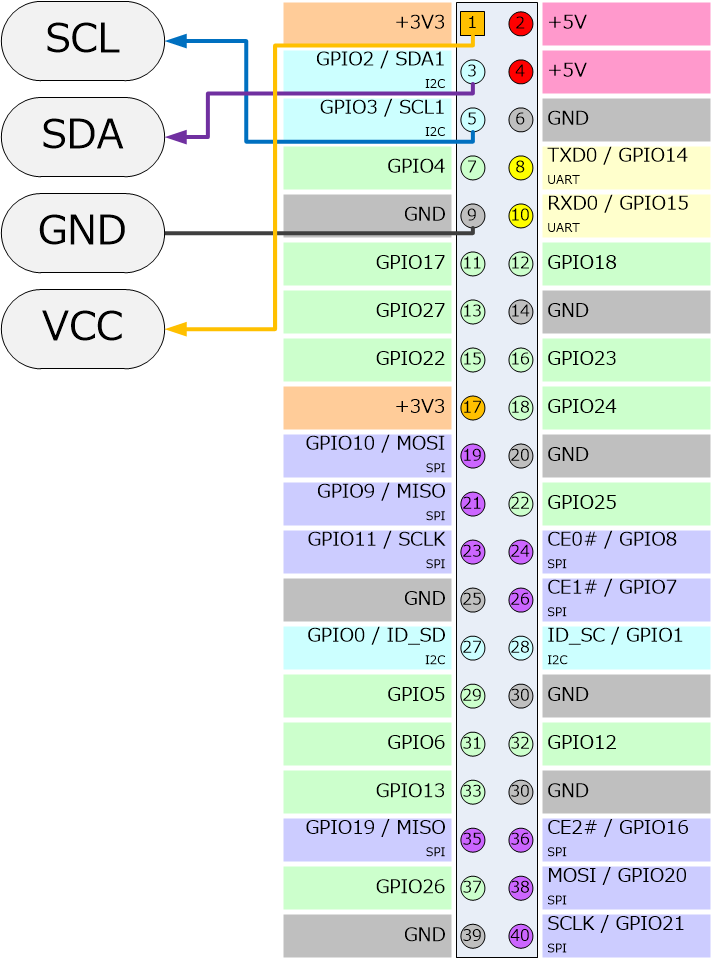 4本のケーブルで、PWM制御基板のI2C端子とGPIOの1,3,5,9番端子を接続しました。
4本のケーブルで、PWM制御基板のI2C端子とGPIOの1,3,5,9番端子を接続しました。
サーボモーター配線
SG90の場合、配線の色は以下になります。
- 茶:GND
- 赤:5V
- 橙:PWM(SIG)
PWM制御基板に接続します。
- Ch.0にチルト用モーター(上下)
- Ch.1にパン用モーター(左右)
OSの設定
I2Cバスドライバの有効化
raspi-configでi2cバスを使用できるように設定後、再起動しました。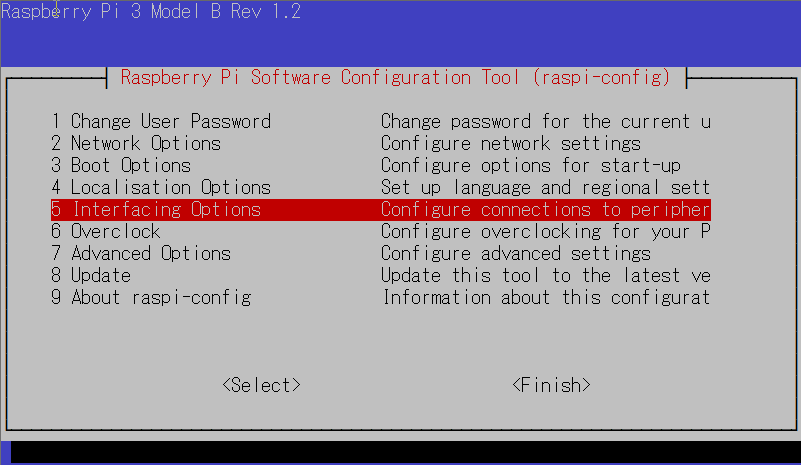
電動雲台制御画面の作成
パラメータ調整・コントロール画面の設計
雲台の制御は、Webサーバ(Node.js + Express.js)を使用させて頂こうと思います。
Webブラウザからアクセス可能な2つの画面を作成しました。
- サーボモーターのパラメータ調整画面
- 周波数、turn on/turn offパラメータを入力して、モーターを実際に動かします。
- パン・チルト(Ch.0と1)それぞれの可動範囲がわかったら、そのパラメータを記録します。
- 電動雲台の制御画面
- 1番で調べたパラメータを読み込み、パン・チルト同時にモータを制御します。
Node.js+Express.jsプロジェクト作成
- プロジェクト名は「SG90CamMnt」にしてみました。
#node.jsインストール sudo apt-get install nodejs npm #express-generatorインストール sudo npm install -g express-generator #expressプロジェクト作成 express --view=ejs SG90CamMnt #動作確認 cd SG90CamMnt npm install DEBUG=SG90CamMnt:* npm start #Webブラウザで確認 http://<Raspberry PiのIPアドレス>:3000 - PWM制御に使用するモジュールをインストールしておきます。
npm install --save i2c-bus pca9685
ソースファイルの作成・変更
app.jsファイル変更
- app.jsファイルを編集します。
vi app.js「var app = express();」行の下に下記を追加しました。
var app = express(); // -------------------------------------------------- // pwm_testページ app.get('/pwm_test', function(req, res, next) { res.render('pwm_test'); }); // WebSocketのインスタンス生成 var WebSocket = require('ws').Server; var wss = new WebSocket({port:3001}); // Raspberry Piで何かイベント処理をさせるWsEventHandlerインスタンス生成 // ws-event-handler.jsファイルにその処理を書きましょう var WsEventHandler = require('./ws-event-handler'); var ev = new WsEventHandler; // WebSocketの送受信処理 wss.on('connection', function connection(ws) { console.log('WebSocket:接続しました') // デバイスの初期化など ev.connected(wss); ws.on('message', function incoming(data){ console.log("WebSocket:受信しました: " + data); // 何かイベントに応じたデバイスの処理実行 ev.handleEvent(wss, JSON.parse(data)); // 受け取ったイベントをWebSocketクライアントにログとして表示 wss.sendAllClients(data); }); ws.on('close',function close(){ // デバイスの終了処理など ev.closed(wss); console.log('WebSocket:切断しました'); }); }); // 全クライアントにデータを送信するメソッドを追加しておきます wss.sendAllClients = function SendAllClients(data) { this.clients.forEach(function each(client){ // 全クライアントにデータ送信 client.send(data); }); } // --------------------------------------------------WebSocketサーバを作成、データを送受信しつつ、ws-event-handler.jsファイルの関数を実行する内容です。
views/index.ejsファイル変更
- index.ejsファイルをそっくり入れ替えます。
vi views/index.ejs電動雲台の制御画面になります。
<!DOCTYPE html> <html lang="ja"> <head> <meta charset="UTF-8"> <meta name="viewport" content="width=device-width, initial-scale=1.0"> <title>SG90カメラマウント制御</title> <link rel='stylesheet' href='/stylesheets/style.css' /> <style> body { margin: 0.5em; border: 0; padding: 0.5em; } dt { background-color: aliceblue; } .ope_panel { outline: 1px solid blue; margin: 0px; padding: 0px; border: 0px; } .tableStyle { display: table; clear: both; width: auto; /* outline: solid 1px red; */ } .tableStyle dl { /* outline: solid 1px green; */ margin:0px; padding: 0px; border: 0px; } .tableStyle dt, .tableStyle dd { padding: 0 1em; /* outline: solid 1px blue; */ } .tableStyle dt, .tableStyle dd { display: table-cell; width: auto; } </style> </head> <body> <a href="pwm_test">pwm制御パラメータ調整</a> <h1>SG90カメラマウント制御</h1> <div id="app"> <section> <h2>制御パラメータ</h2> <div class="tableStyle"> <dl> <dt>共通</dt> <dd> <dl> <dt>周波数</dt> <dd>{{ sg90_pwm.frequency }}[Hz]</dd> </dl> </dd> </dl> <dl v-for="item in sg90_pwm.channels"> <dt>ch. {{ item.ch }}</dt> <dd> <dl> <dt>turnon</dt> <dd>{{ item.turnon }}</dd> <dt>turnoff</dt> <dd> <dl> <dt>start</dt> <dd>{{ item.turnoff.start }}</dd> <dt>end</dt> <dd>{{ item.turnoff.end }}</dd> </dl> </dd> </dl> </dd> </dl> </div> </section> <section> <h2>カメラマウントコントロール</h2> <ul> <li>四角の領域を指でタッチ/マウスクリックしながら動かします</li> </ul> <div> <div class="ope_panel" style="width:60%;" ref="ope_panel" v-on:mousemove="onMouseMove" v-on:mousedown="onMouseDown"></div> <dl> <dt>カーソル位置</dt> <dd>{{ cursor.x }} , {{ cursor.y }}</dd> <dt>turn off</dt> <dd>{{ turnoff[0] }} , {{ turnoff[1] }}</dd> <dt>操作中</dt> <dd>{{ dragging }}</dd> </dl> </div> </section> <section class="log"> <h2>WebSocket応答</h2> <ul v-for="subitem in logs"> <li>{{ subitem }}</li> </ul> </section> <button type="button" v-on:click="clearParam()">SG90設定(ローカルストレージ)クリア</button> <section class="clear"> <small>© 2018 日記というほどでも denor.jp</small> </section> </div> <script src="https://cdn.jsdelivr.net/npm/vue/dist/vue.js"></script> <script> // 実際にWebSocketで送信するPWM制御データ var PwmState = function () { this.data = { 'resolution': 4096, 'frequency': null, 'channels': [ { 'ch': 0, 'name': 'Ch.0', 'turnon': null, 'turnoff': null }, { 'ch': 1, 'name': 'Ch.1', 'turnon': null, 'turnoff': null } ] } } PwmState.prototype.calcTurnStep = function(start, end, pos) { pos = pos < 0 ? 0 : pos; pos = pos > 1 ? 1 : pos; if (end < start) { return Number.parseInt(end + (start - end) * pos); } else { return Number.parseInt(start + (end - start) * pos); } } var pwm = new PwmState(); //PWM制御データのインスタンス var app1 = new Vue({ el: '#app', data: { 'pwmdata': pwm.data, //インスタンスへの参照 'cursor' : {'x' : 0, 'y' : 0}, 'pos': [0, 0], 'turnoff' : [0, 0], 'dragging': false, //pwm_testページで設定した可動範囲パラメータ //設定された範囲を超えないようにPWM制御データを作成して送信 'sg90_pwm': { 'frequency': null, 'channels': [ { 'ch': 0, 'turnon': null, 'turnoff': { 'start': null, 'end': null } }, { 'ch': 1, 'turnon': null, 'turnoff': { 'start': null, 'end': null } }, ] }, timerId: null, timerInterval: 100, 'logs': [] }, methods: { createPwmState: function() { var src = this.$data.sg90_pwm; var dst = this.$data.pwmdata; dst.frequency = Number.parseInt(src.frequency); for(var i=0; i<dst.channels.length; i++) { dst.channels[i].turnon = Number.parseInt(src.channels[i].turnon); this.$data.turnoff[i] = dst.channels[i].turnoff = pwm.calcTurnStep(Number.parseInt(src.channels[i].turnoff.start), Number.parseInt(src.channels[i].turnoff.end), this.$data.pos[i] / 100); } }, sendEventToWs: function () { if (this.$data.timerId) return; var _this = this; this.$data.timerId = setTimeout(function () { socket.send(JSON.stringify(_this.$data.pwmdata)); clearTimeout(_this.$data.timerId); _this.$data.timerId = null; }, this.$data.timerInterval); }, onMouseMove: function (ev) { if (!this.$data.dragging) return; this.$data.cursor.x = ev.offsetX; this.$data.cursor.y = ev.offsetY; this.$data.pos[0] = ev.offsetX / ev.target.clientWidth * 100; this.$data.pos[1] = ev.offsetY / ev.target.clientHeight * 100; this.createPwmState(); this.sendEventToWs(); }, onMouseDown: function (ev) { this.$data.dragging = true; }, onMouseUp: function (ev) { this.$data.dragging = false; }, addLogs: function (log) { var logs = this.$data.logs; logs.unshift(log); var maxlog = 10; if (logs.length > maxlog) { logs.splice(maxlog, logs.length - maxlog); } }, loadPwmParam: function () { var name = 'sg90_pwm'; if (!localStorage[name]) return false; this.$data.sg90_pwm = JSON.parse(localStorage[name]); return true; }, clearParam: function () { localStorage.clear(); } }, mounted: function () { var _this = this; // 操作パネルを正方形に変形します var resizeOpePanel = function (ev) { var pcWidth = Number.parseInt(_this.$refs.ope_panel.style.width); var scFullWidth = Number.parseInt(window.innerWidth); _this.$refs.ope_panel.style.height = (pcWidth * scFullWidth / 100).toString() + "px"; } resizeOpePanel(); window.addEventListener('resize', resizeOpePanel); window.addEventListener('mouseup', this.onMouseUp); if (!this.loadPwmParam()) { alert('カメラマウントの制御に必要なパラメータが入力されていません。\nお手数ですが「pwm制御パラメータ調整」ページにて、最適な値を調べて入力して下さい。') } socket = new WebSocket('ws://' + window.location.hostname + ':3001/'); var _this = this; socket.addEventListener('open', function (event) { _this.addLogs('接続しました'); }); socket.addEventListener('message', function (event) { _this.addLogs('Raspi応答:' + event.data); }); this.addLogs(this.$data.timerInterval + "msごとにPWM制御データを送信します") } }); </script> </body> </html>
views/pwm_test.ejsファイル作成
- pwm_test.ejsファイルを作成します。
vi views/pwm_test.ejsモーターの可動範囲を調べる画面になります。
<!DOCTYPE html> <html lang="ja"> <head> <meta charset="UTF-8"> <meta name="viewport" content="width=device-width, initial-scale=1.0"> <title>PWM制御パラメータ調整</title> <link rel='stylesheet' href='/stylesheets/style.css' /> <style> body { margin: 0.5em; border: 0; padding: 0.5em;} dt { background-color: aliceblue; } canvas { border: 1px solid aliceblue; } @media screen and (min-width:760px) { .clear { clear: both; } .log { width: 50%; } .setting, .graph, .log { float: left; } } </style> </head> <body> <a href="/">SG90カメラマウント制御</a> <h1>PWM制御パラメータ調整</h1> <div id="app"> <section> <h2>カメラマウントで使用するパラメータ</h2> <dl> <h3>共通</h3> <dt>周波数</dt> <dd><input type="number" v-model="sg90_pwm.frequency"></dd> <dt>Ch.0 turnon</dt> </dl> <dl v-for="item in sg90_pwm.channels"> <h3>Ch.{{ item.ch }}</h3> <dt>turon</dt> <dd><input type="number" v-model="item.turnon"></dd> <dt>turoff start</dt> <dd><input type="number" v-model="item.turnoff.start"></dd> <dt>turoff end</dt> <dd><input type="number" v-model="item.turnoff.end"></dd> </dl> </section> <hr> <section class="setting"> <h2>こちらで良さそうなパラメータを探します</h2> <h3>共通</h3> <dl> <dt>Frequency:周波数</dt> <dd><input type="number" min="24" max="1526" v-model="pwmdata.frequency">Hz <input type="range" min="24" max="1526" step="1" v-model="pwmdata.frequency">(24-1526)</dd> </dl> <template v-for="item in pwmdata.channels"> <h3>Ch.{{ item.ch }}:{{ item.name }}</h3> <dl> <dt>turn on steps:ONにするタイミング</dt> <dd> <input type="number" v-model="item.turnon" min="0" max="4095"> <input type="range" min="0" v-model="item.turnon" max="4095" step="1">(0-4095) </dd> <dt>turn off steps:OFFにするタイミング</dt> <dd> <input type="number" v-model="item.turnoff" min="0" max="4095"> <input type="range" v-model="item.turnoff" min="0" max="4095" step="1">(0-4095) </dd> </dl> </template> <h2>パラメータ情報</h2> <dl> <dt>1周期の時間</dt> <dd>{{ period_sec | usec | toFixed }}μs = {{ period_sec | msec | toFixed }}ms</dd> </dl> <template v-for="item in pwmdata.channels"> <h3>Ch.{{ item.ch }}:{{ item.name }}</h3> <dl> <dt>ON時間</dt> <dd>{{ calcOnPeriodSec(item) | msec | toFixed }} ms</dd> <dt>OFF時間</dt> <dd>{{ calcOffPeriodSec(item) | msec | toFixed }} ms</dd> <dt>Duty Cycle:1周期のONの割合</dt> <dd>{{ calcDutyCycle(item) * 100 | toFixed }}%</dd> </dl> </template> </section> <section class="graph"> <canvas ref="canvas_graph" width="480px" height="320px"></canvas> </section> <section class="log"> <h2>WebSocket応答</h2> <ul v-for="subitem in logs"> <li>{{ subitem }}</li> </ul> </section> <section class="clear"> <small>© 2018 日記というほどでも denor.jp</small> </section> </div> <script src="https://cdn.jsdelivr.net/npm/vue/dist/vue.js"></script> <script src="/javascripts/pwm_graph2.js"></script> <script> // こちらはテスト的に動かす場合の実験パラメータ var PwmState = function () { this.data = { 'resolution': 4096, 'frequency': 50, 'channels': [ { 'ch': '0', 'name': 'Ch.0', 'turnon': '0', 'turnoff': '1' }, { 'ch': '1', 'name': 'Ch.1', 'turnon': '0', 'turnoff': '1' } ] } } PwmState.prototype.calcCycleSec = function () { return (1.0 / Number.parseInt(this.data.frequency)); } PwmState.prototype.calcOnPeriod = function (ton, toff) { var turnon = Number.parseInt(ton); var turnoff = Number.parseInt(toff); var res = Number.parseInt(this.data.resolution); return (turnon < turnoff) ? (turnoff - turnon) : (turnoff + res - turnon); } PwmState.prototype.calcOffPeriod = function (ton, toff) { return Number.parseInt(this.data.resolution) - this.calcOnPeriod(ton, toff) } PwmState.prototype.calcDutyCycle = function (ton, toff) { return this.calcOnPeriod(ton, toff) / Number.parseInt(this.data.resolution); } PwmState.prototype.calcOnPeriodSec = function (ton, toff) { return this.calcCycleSec() * (this.calcOnPeriod(ton, toff) / Number.parseInt(this.data.resolution)); } PwmState.prototype.calcOffPeriodSec = function (ton, toff) { return this.calcCycleSec() * (this.calcOffPeriod(ton, toff) / Number.parseInt(this.data.resolution)); } var pwm = new PwmState(); var graph = new PwmGraph(pwm); var socket; var app1 = new Vue({ el: '#app', data: { 'pwmdata': pwm.data, timerId: null, timerInterval: 100, logs: [], // こちらはSG90カメラマウントページで動かす場合の決定パラメータ 'sg90_pwm': { 'frequency': null, 'channels': [ { 'ch': 0, 'turnon': null, 'turnoff': { 'start': null, 'end': null } }, { 'ch': 1, 'turnon': null, 'turnoff': { 'start': null, 'end': null } }, ] }, 'sg90_pwm_tmpl': null, }, methods: { SendEventToWs: function (interval) { if (this.$data.timerId) return; var _this = this; this.$data.timerId = setTimeout(function () { socket.send(JSON.stringify(_this.$data.pwmdata)); clearTimeout(_this.$data.timerId); _this.$data.timerId = null; }, interval); }, calcDutyCycle: function (item) { return pwm.calcDutyCycle(item.turnon, item.turnoff); }, calcOnPeriodSec: function (item) { return pwm.calcOnPeriodSec(item.turnon, item.turnoff); }, calcOffPeriodSec: function (item) { return pwm.calcOffPeriodSec(item.turnon, item.turnoff); }, addLogs: function (log) { var logs = this.$data.logs; logs.unshift(log); var maxlog = 10; if (logs.length > maxlog) { logs.splice(maxlog, logs.length - maxlog); } }, loadPwmParam: function () { var name = 'sg90_pwm'; if (!localStorage[name]) return false; this.$data.sg90_pwm = JSON.parse(localStorage[name]); return true; }, savePwmParam: function () { var name = 'sg90_pwm'; localStorage[name] = JSON.stringify(this.$data.sg90_pwm); } }, watch: { 'pwmdata': { handler: function (newVal, oldVal) { graph.draw(this.$refs.canvas_graph); this.SendEventToWs(this.$data.timerInterval); }, deep: true }, 'sg90_pwm': { handler: function (newVal, oldVal) { this.savePwmParam(); }, deep: true } }, computed: { period_sec: function () { return pwm.calcCycleSec(); } }, mounted: function () { socket = new WebSocket('ws://' + window.location.hostname + ':3001/'); var _this = this; socket.addEventListener('open', function (event) { _this.addLogs('接続しました'); }); socket.addEventListener('message', function (event) { _this.addLogs('Raspi応答:' + event.data); }); graph.draw(this.$refs.canvas_graph, pwm); this.addLogs(this.$data.timerInterval + "msごとにPWM制御データを送信します") this.SendEventToWs(this.$data.timerInterval); this.$data.sg90_pwm_tmpl = JSON.parse(JSON.stringify(this.$data.sg90_pwm)); this.loadPwmParam(); }, filters: { toFixed: function (val) { return val.toFixed(2); }, msec: function (val) { return val * 1000; }, usec: function (val) { return val * 1000000; } } }) </script> </body> </html>
public/javascripts/pwm_graph2.jsファイル作成
- pwm_grasph2.jsファイルを作成します。
vi public/javascripts/pwm_graph2.jsモーターの可動範囲を調べる画面のグラフを描画します。
var PwmGraph = function (pwm) { this.ctx = null; this.pwm = pwm; this.client = { width: 0, height: 0 }; this.margin = 40; //px this.graph = { width: 0, height: 0 }; this.normalized = { width: 100, height: 0 }; // this.channels = 3; this.channels = 2; this.padding = 3; } PwmGraph.prototype.draw = function (cvs) { this.ctx = cvs.getContext('2d'); this.client.width = cvs.width; this.client.height = cvs.height; this.clear(); this.graph.width = this.client.width - this.margin * 2; this.graph.height = this.client.height - this.margin * 2; //座標軸描画 this.drawAxis(); //パラメータ描画 this.drawParams(); //グラフ本体描画 this.drawGraph(1, pwm.data.channels[0], 'green'); this.drawGraph(0, pwm.data.channels[1], 'blue'); } PwmGraph.prototype.clear = function () { var ctx = this.ctx; ctx.save(); this.resetTransform(); ctx.fillStyle = 'white'; ctx.fillRect(0, 0, this.client.width, this.client.height); ctx.restore(); } PwmGraph.prototype.setTransformNormalized = function () { // 座標変換 Y軸反転、グラフの原点を描画の原点に合わせ // さらにグラフ横軸の座標を100に正規化します var ctx = this.ctx; this.normalized.height = this.normalized.width * this.graph.height / this.graph.width; ctx.setTransform(this.graph.width / this.normalized.width, 0, 0, -this.graph.width / this.normalized.width, this.margin, this.client.height - this.margin); } PwmGraph.prototype.resetTransform = function () { this.ctx.setTransform(1, 0, 0, 1, 0, 0); } PwmGraph.prototype.drawAxis = function () { var ctx = this.ctx; ctx.beginPath(); this.setTransformNormalized(); ctx.lineWidth = 1; ctx.lineCap = 'butt'; ctx.moveTo(0, 0); ctx.lineTo(0, this.normalized.height); ctx.moveTo(this.normalized.width, 0); ctx.lineTo(this.normalized.width, this.normalized.height); var xScale = 10; for (var i = 1; i < xScale; i++) { var xStep = this.normalized.width / xScale; ctx.moveTo(xStep * i, 0); ctx.lineTo(xStep * i, this.padding); } this.resetTransform(); var res = Number.parseInt(this.pwm.data.resolution); ctx.font = "16px serif"; ctx.fillText("0", this.margin - 14, this.margin + 14); ctx.fillText((res - 1).toString(), this.client.width - this.margin - 40, this.margin + 14); ctx.strokeStyle = 'black'; ctx.stroke(); } PwmGraph.prototype.drawParams = function () { var ctx = this.ctx; ctx.beginPath(); this.resetTransform(); ctx.font = "20px serif"; ctx.fillText( (this.pwm.calcCycleSec() * 1000).toFixed(3).toString() + 'ms ' + (this.pwm.calcCycleSec() * 1000000).toFixed(3).toString() + 'μs', this.client.width - 230, this.client.height - 20); ctx.strokeStyle = 'black'; ctx.stroke(); } PwmGraph.prototype.drawGraph = function (index, channel, color) { var ctx = this.ctx; var amp = (this.normalized.height - this.padding) / this.channels; var minY = this.padding * 2 + amp * index; var maxY = minY + amp - this.padding; var turnon = Number.parseInt(channel.turnon); var turnoff = Number.parseInt(channel.turnoff); ctx.beginPath(); this.setTransformNormalized(); ctx.lineWidth = 1.2; ctx.strokeStyle = color; if (turnon > turnoff) { var tmp = minY; minY = maxY; maxY = tmp; tmp = turnon; turnon = turnoff; turnoff = tmp; } var res = Number.parseInt(this.pwm.data.resolution); var tonX = turnon / res * this.normalized.width; var toffX = turnoff / res * this.normalized.width; ctx.moveTo(0, minY); ctx.lineTo(tonX, minY); ctx.lineTo(tonX, maxY); ctx.lineTo(toffX, maxY); ctx.lineTo(toffX, minY); ctx.lineTo(this.normalized.width, minY); ctx.stroke(); } //© 2018 日記というほどでも denor.jp
ws-event-handler.jsファイル作成
- 最後にws-event-handler.jsファイルを作成します。
vi ws-event-handler.jspca9685モジュールを使用して、PWM制御基板に命令を送る内容です。
var i2cBus = require("i2c-bus"); var Pca9685Driver = require("pca9685").Pca9685Driver; var pwm = null; var prevFrequency = 0; var WsEventHandler = function() { this.client_cnt = 0; } WsEventHandler.prototype.connected = function(wss) { this.client_cnt ++; if(this.client_cnt > 1) return; // 以下接続開始時の処理 prevFrequency = 0; } var setPluseRange = function(wss, pwm, channel) { if (! channel) return; wss.sendAllClients("setPulseRange開始:" + JSON.stringify(channel)); pwm.setPulseRange(Number.parseInt(channel.ch), Number.parseInt(channel.turnon), Number.parseInt(channel.turnoff), function(err) { if (err) { wss.sendAllClients("CH" + channel.ch + ":setPulseRangeエラー"); } else { wss.sendAllClients("CH" + channel.ch + ":setPulseRange完了"); } }); } WsEventHandler.prototype.handleEvent = function(wss, data) { if(! data) return; //イベントに応じた処理実行 // 周波数が変わった場合、pwm制御オブジェクトを再作成 var newFrequency = Number.parseInt(data.frequency); if (prevFrequency != newFrequency && 24 <= newFrequency && 1526 >= newFrequency) { var options = { i2c: i2cBus.openSync(1), address: 0x40, frequency: newFrequency, debug: false }; wss.sendAllClients("PCA9685初期化開始:" + JSON.stringify(data)); pwm = new Pca9685Driver(options, function(err) { if (err) { wss.sendAllClients("PCA9685:初期化エラー"); } else { wss.sendAllClients("PCA9685:初期化完了"); } }); prevFrequency = newFrequency; } for(var i=0; i<3; i++) { setPluseRange(wss, pwm, data.channels[i]) } } WsEventHandler.prototype.closed = function(wss) { this.client_cnt --; if(this.client_cnt > 0) return; // 以下接続終了時の処理 } module.exports = WsEventHandler //© 2018 日記というほどでも denor.jp
以上で準備が完了しました。
サーボモーターの設定手順
作ってから気づいたのですが。上記のソースコードは、タッチ操作ではなく、マウス操作が必要になります。PC等、マウス操作が可能なWebブラウザからアクセスして下さい。
- 作成したSG90CamMntプロジェクトを実行すると
DEBUG=SG90CamMnt:* npm startスマートフォンやWebブラウザで電動雲台の制御画面にアクセスできるようになります。
http://<Raspberry PiのIPアドレス>:3000 - モーターのパラメータを入れていない場合、コントロール画面で警告が表示されます。
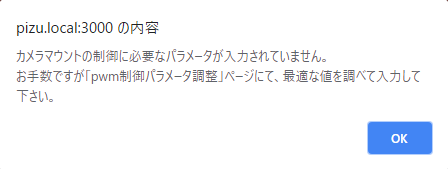
- 画面左上のリンクから、パラメータの入力画面へ移動します。

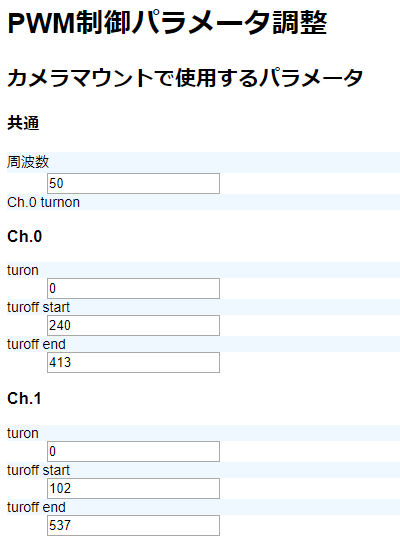
- 画面を下にスクロールすると、周波数やturn onステップの入力画面になります。

- SG90の場合、仕様上の駆動周波数は50Hzになります。
- turn onは0のままで問題無いと思います。
- turn offを変更して、モーターの動く範囲を調べます。チルトの場合、モーターを動かしすぎて、雲台を壊さないようにご注意下さい。
- 最適なパラメータがわかったら、画面上部の「カメラマウントで使用するパラメータ」欄に入力します。おうちの環境の場合、チルト用のモーターは、turn offが240から413くらいが丁度よい感じでした。
- 画面左上のリンクから「SG90カメラマウント制御」画面に戻ると、実際に電動雲台を動かす事ができます。
 画面下部の四角の領域で、マウスボタンを押しながらマウスを動かすと、カメラが上下左右に動くかと思います。
画面下部の四角の領域で、マウスボタンを押しながらマウスを動かすと、カメラが上下左右に動くかと思います。 - 制御パラメータは、Webブラウザのローカルストレージに格納されます。ローカルストレージをクリアしたい場合、「SG90設定(ローカルストレージ)クリア」ボタンを押して消去することができます。
HTMLのマウスイベントでは、タッチパッドの操作は取れないのですね。うーむ。
本当はスマートフォンでタッチパッドで動かそうと思っていたのですが。
そのあたりは、使用するスマートフォンの機種とWebブラウザに合わせて、HTMLを少し変更すれば対応できそうです。
今回は雲台を動かしただけで、雲台にまだカメラを取り付けていません。
そのうち、何か取付用の部品を3Dプリンタで作成しようと思います。
コメントを残す