RISC V CPUを搭載したシングルボードコンピュータ。
VisionFive 2でDebianを起動しまして。
ブートローダーをビルド。
最新版に更新する手順を記録させて頂こうと思います。
更新前後のVisionFive 2ブートローダーのバージョン
2023年3月25日現在。本日ビルドしたブートローダーはこのような感じです。
Open SBI VF2_v2.11.5という記述があります。 一方、更新前のバージョンは。
一方、更新前のバージョンは。
OpenSBI v1.2でした。 VisionFive 2を購入したのは2023年2月、到着は3月でした。
VisionFive 2を購入したのは2023年2月、到着は3月でした。
ブートローダーの更新は、tftpを使用する方法と、flashcpを使用する方法があります。このうちflashcpを使用する方法は、VF2_v2.5.0以降が必要です。
購入した状態のVisionFive 2のOpenSBバージョンはv1.2のため、必ずtftpで更新する必要がある、と考えたほうが良いと思います。
必要な機材
USBシリアル変換アダプタ
VisionFive 2のブートローダーの更新は、シリアルコンソールへの接続が必要になります。
ブートローダーのイメージをVisionFive 2に転送する際、シリアルコンソールでコマンドを実行する必要があります。
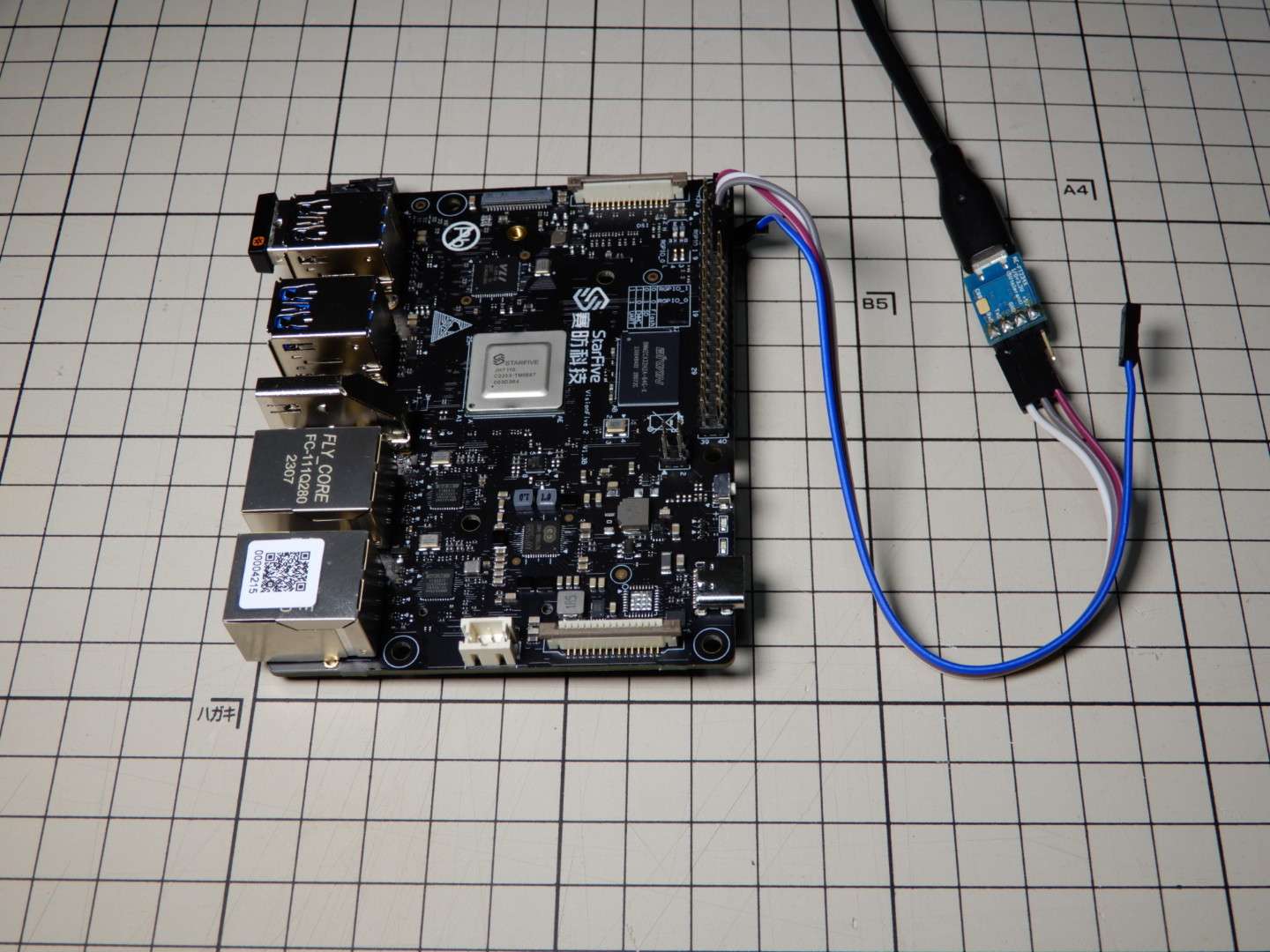
下記の3つをご用意下さい。
- USBシリアル変換アダプタ
- ジャンパーワイヤー メスーメス
- USBケーブル Type-A microB
[amazonjs asin=”B09MW9XQ6G” locale=”JP” title=”Moechando CH340Nを搭載 USB-シリアル変換モジュール USB-TTl変換モジュール AタイプUSBプラグ シリアル側:3.3V、TXD、RXD、GND、+5V、GND、RTS(入荷予定あり)”][amazonjs asin=”B072KH53HR” locale=”JP” title=”KKHMF 3PCS 120P 1P-1P 20cm ブレッドボード・ジャンパーワイヤ(オス-オス,オス-メス,メス-メス )120本”][amazonjs asin=”B0711PVX6Z” locale=”JP” title=”Amazonベーシック USBケーブル プリンター用0.9m (2.0タイプAオス – マイクロBケーブル) ブラック”]
tftpdサーバ
VisionFive 2へ新しいブートローダーを転送するために、Vision Five 2からLAN経由でtftpdへ接続する必要があります。
よって、何か別のサーバPCが必要、ということになります。
私は手元のRaspberry Piにtfptd(tftpデーモン)をインストールしました。[amazonjs asin=”B089GSG8Y1″ locale=”JP” title=”ラズベリーパイ 4 コンピューターモデルB 8GB Raspberry Pi 4 ラズパイ 4 TELEC認定取得済み (Raspberry Pi 4 8GB)”]
この記事の手順は、Raspberry Pi OS(64ビット版)にてtftpdを起動し、ビルドしたブートローダーを配備する内容になります。Ubuntu等、Debian系のLinuxでしたら、他のPCでも同じ流れになると思います。
tftpdに配備するファイル
ブートローダーの更新ですが。下記の2つのファイルをビルドして、tftpサーバに置く、と考えるとわかりやすいと思います。
- u-boot-spl.bin.normal.out
- visionfive2_fw_payload.img
こちらのファイルが、ビルドしたブートローダーになります。Raspberry Piでtftpdを動かし、VisionFive 2のブートローダーから接続して、ファイルを転送→最新版に更新する流れになります。
Raspberry Piは、tftpdサーバとして、ファイルを置くという用途です。
新しいブートローダーのビルドは、VisionFive 2でビルドしようと思います。クロスコンパイルも可能かもしれませんが、アーキテクチャが全く異なるCPUということで、難易度は最高だと思います。
それでは具体的にこの2つのファイルをビルドしたいと思います。
VisionZero 2用ブートローダービルド手順
公式情報
公式の手順はこちらになります。[blogcard url=”https://doc-en.rvspace.org/VisionFive2/PDF/VisionFive2_SW_TRM.pdf”]しかし手順通りでは、足らない材料がある感じでした。ビルドエラーが発生したり。
よって、本記事では、こちらをベースに足らないものを書き足させて頂いた内容になります。
なお、この記事は手順のみ記載してあるため、ファイルの具体的な用途が書かれておりません。u-bootが何か?OpenSBIが何か?等。そのあたりを認識したい場合は、公式マニュアルに目を通してみて下さい。
VisionFive 2でDebian起動
RISC Vのブートローダーをビルドするということで。対象のCPUであるVisionFive 2でブートローダーをビルドしないと、難易度がかなり高いと思います。
VisionFive 2でビルドする場合でも、Debianはriscv64、ブートローダーはriscv(32ビット)扱いのため、クロスコンパイル環境なのかなと思います。
まずは、VisionFive 2でDebianを起動します。
起動後、ルートパーティションを拡張しておきましょう。
ビルド環境作成
rootでログインしたため、sudoコマンドは省略しました。
更新とビルド関連ツールのインストールを行います。
apt update
apt ugrade -y
apt install gcc-riscv64-linux-gnu -y
apt install buid-essential git flex bison make device-tree-compiler -y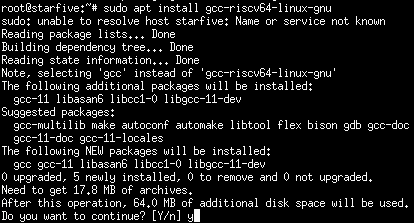 ソースの取得にgitコマンド、コンフィグの作成にflex, bison、ビルドにmake、そしてdevice-tree-compilerが無いとイメージ作成時にエラーが出て進まなくなりました。このあたりを入れておきましょう。
ソースの取得にgitコマンド、コンフィグの作成にflex, bison、ビルドにmake、そしてdevice-tree-compilerが無いとイメージ作成時にエラーが出て進まなくなりました。このあたりを入れておきましょう。
riscv64-linux-gnu-gcc -v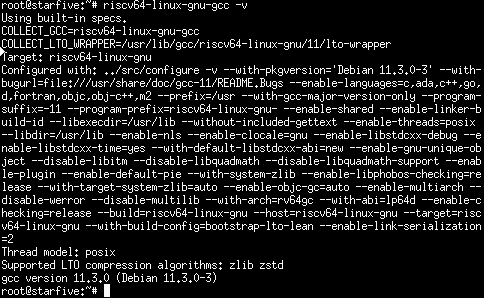 gccのバージョンを確認したところ、11.3.0でした。Debianのバージョンは11.3.0なのですね。ふむふむ。
gccのバージョンを確認したところ、11.3.0でした。Debianのバージョンは11.3.0なのですね。ふむふむ。
riscv64アーキテクチャのコンパイラを使うのは初めてです。
新しいCPUに、シングルボードコンピュータというお手軽なデバイスで触れられるというのは、なんだか新鮮な感じがします。
u-bootのコンパイル
準備ができたところで、最初にu-bootをコンパイルします。
cd
# ソース取得
git clone https://github.com/starfive-tech/u-boot.git
cd u-boot
git checkout -b JH7110_VisionFive2_devel origin/JH7110_VisionFive2_devel
git pull
# コンフィグ作成
make starfive_visionfive2_defconfig ARCH=riscv CROSS_COMPILE=riscv64-linux-gnu-
# コンパイル
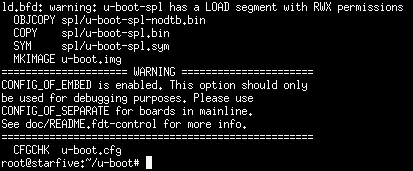
make ARCH=riscv CROSS_COMPILE=riscv64-linux-gnu-VisionFiveは無印(1)と2が存在します。最初、誤って無印のマニュアルを見てしまい、コンフィグのオプションを間違ってしましました。正しいマニュアルを見ながら進めましょう。
 いくつか警告が表示されましたが、気にしなくて良さそうです。
いくつか警告が表示されましたが、気にしなくて良さそうです。
コンパイルとリンク完了後、3つのファイルが正しく生成されているか確認します。
- u-boot.bin
- arch/riscv/dts/starfive_visionfive2.dtb
- spl/u-boot-spl.bin
こちらのファイル材料にして、次の工程のファイルを作る・・・を何度か繰り返す感じです。
OpenSBIのコンパイル
次にOpenSBIをビルドします。
cd
git clone https://github.com/starfive-tech/opensbi.git
cd opensbi
make ARCH=riscv CROSS_COMPILE=riscv64-linux-gnu- PLATFORM=generic \
FW_PAYLOAD_PATH=../u-boot/u-boot.bin \
FW_FDT_PATH=../u-boot/arch/riscv/dts/starfive_visionfive2.dtb \
FW_TEXT_START=0x40000000 makeのオプションに、先ほどビルドしたu-boot.binとstarfive_visionfive2.dtdファイルを指定する感じです。
makeのオプションに、先ほどビルドしたu-boot.binとstarfive_visionfive2.dtdファイルを指定する感じです。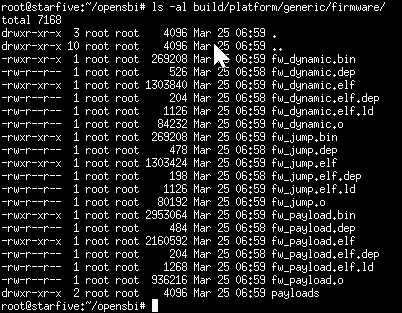 ビルドが完了すると、firmwareディレクトリにfw_payload.binファイルが作成されます。
ビルドが完了すると、firmwareディレクトリにfw_payload.binファイルが作成されます。
ls -al opensbi/build/platform/generic/firmwareSPLファイル作成
ツールをビルドします。ソースを取得してmakeしました。
cd
git clone https://github.com/starfive-tech/Tools
cd Tools
git checkout master
git pull
cd spl_tool/
make spl_toolがビルドした実行バイナリになります。
spl_toolがビルドした実行バイナリになります。
./spl_tool -c -f ../,,/u-boot/spl/u-boot-spl.bin先ほどビルドしたu-boot-spl.binファイルを、spl_toolで加工する感じでしょうか。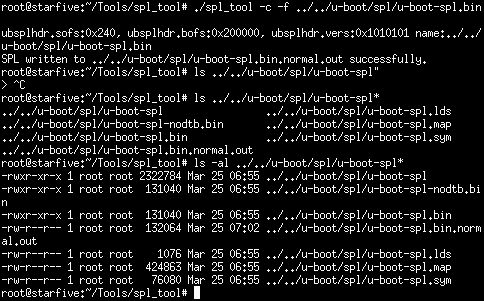
u-boot.splファイルから、「u-boot-spl.bin.normal.out」が生成されました。こちらのファイルがブートローダーとなるファイル2つのうちの1つ、SPLファイルになります。
fw_payloadファイル作成
さて。ビルドも最後です。
cd
cd Tools/uboot_its
cp ../../opensbi/build/platform/generic/firmware/fw_payload.bin ./
../../opensbi/tools/mkimage -f visionfive2-uboot-fit-image.its \
-A riscv -O u-boot -T firmware visionfive2_fw_payload.img先ほどビルドしたfw_payload.binをカレントディレクトリにコピーして、mkimageコマンドでvisionfive2_fw_payload.imgファイルを生成します。
失敗する場合、device-tree-compilerが正しくインストールされているか確認しましょう。
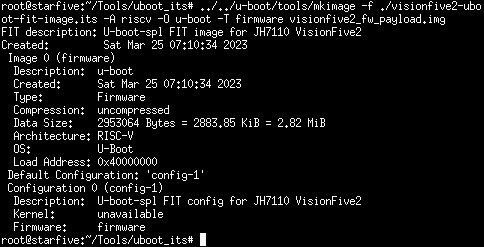 ファームウェアファイルが正しく生成されましたでしょうか。
ファームウェアファイルが正しく生成されましたでしょうか。 ブートローダーとなるファイルの2つめ、visionfive2_fw_payload.imgができました。
ブートローダーとなるファイルの2つめ、visionfive2_fw_payload.imgができました。
ブートローダー更新用tftpd作成
別のPCへtftpdインストール
作成した2つのファイルですが。
- u-boot/spl/u-boot-spl.bin.normal.out
- Tools/uboot_its/visionfive2_fw_payload.img
VisionFive 2ではない、別のPCに置く必要があります。
おうちで稼働している、Raspberry PiでTFTPDを動かして、ファームウェアの更新サーバにしたいと思います。
# VisionFIve 2ではないDebian系OSで実行
sudo apt install tftpd-hpa -y![]() インストール完了後、状態を確認します。
インストール完了後、状態を確認します。
systemctl status tfptd-hpa.service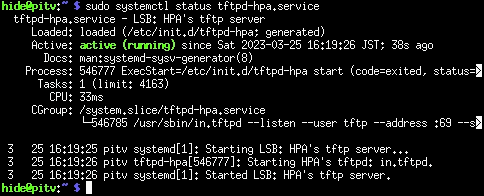 このような感じで問題なくtftpデーモンが動作しているようです。
このような感じで問題なくtftpデーモンが動作しているようです。
tftpdディレクトリへファイルを転送
先ほど作成したブートローダーファイルは、sshプロトコルを使用したrcpコマンドで、VisionFive 2からRaspberry Piへコピーしました。

# VisionFive 2側からrcpにてコピー
rcp ./u-boot/spl/u-boot-spl.bin.normal.out <Raspberry Piユーザ名>@<IPアドレス>:<コピー先ディレクトリ>
rcp ./Tools/uboot_its/visionfive2_fw_payload.img <Raspberry Piユーザ名>@<IPアドレス>:<コピー先ディレクトリ>Raspberry Piのユーザのホームディレクトリへコピーしました。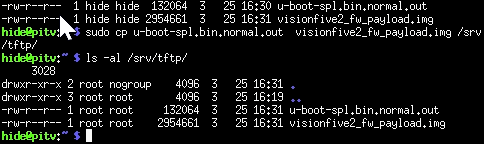
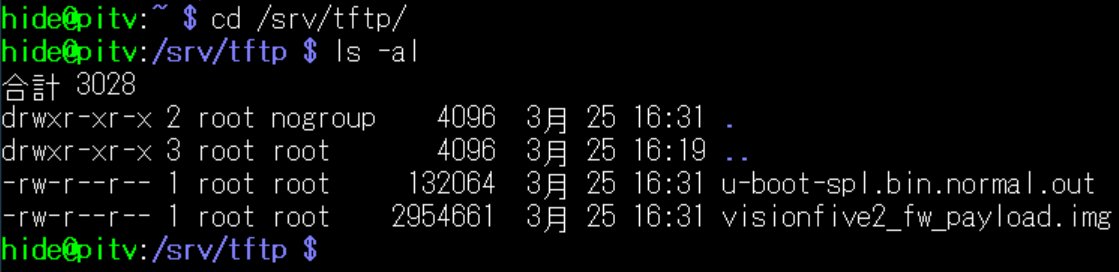
続いてtftpdの公開ディレクトリである/srv/tftpディレクトリにコピーしました。
# tftpdサーバにて
sudo cp u-boot-spl.bin.normal.out visionfive2_fw_payload.img /srv/tftp以上でtftpプロトコルでブートローダーファイルにアクセスできるようになりました。
ビルドせずにダウンロードしたい場合
[blogcard url=”https://github.com/starfive-tech/VisionFive2/releases”]
こちらから、次の2つのファイルをダウンロードできましたか。(ビルドしてから気づいた
- u-boot-spl.bin.normal.out
- visionfive2_fw_payload.img
ブートローダー更新
ブートローダーの公式更新手順は、こちらになります。[blogcard url=”https://doc-en.rvspace.org/VisionFive2/PDF/VisionFive2_QSG.pdf”]VisionFive 2をいちどシャットダウンします。
sudo haltmicroSDカードを取り外して、ブートローダーのコンソールが使用できるようにします。
シリアル変換アダプタを接続し、他のPCからシリアルコンソールに接続し、電源を入れます。前述の通り、更新前のブートローダーが起動します。
コマンドを入力し、tftpdサーバへアクセス、ブートローダーファイルを書き込みます。
なお、下記のコマンドは、コピペではなく手入力しました。コピペでエラーが出る場合は、手入力してみて下さい。
setenv ipaddr <VisionFive 2側のIPアドレス>;setenv serverip <tftpdサーバのIPアドレス>
sf probe
tftpboot 0xa0000000 ${serverip}:/u-boot-spl.bin.normal.out
sf update 0xa0000000 0x0 $filesize
tftpboot 0xa0000000 ${serverip}:/visionfive2_fw_payload.img
sf update 0xa0000000 0x100000 $filesize

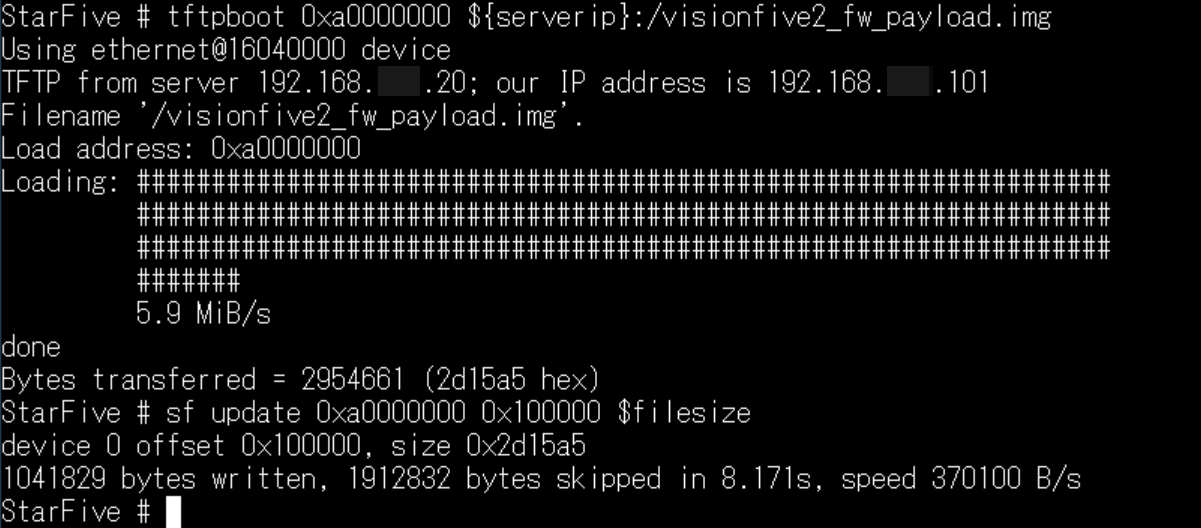
ファイルを1つずつ転送・更新を行う感じでしょうか。
上図のようにエラーが出なければ、更新は完了です。
VisionFive 2の電源を入れ直せば、新しいブートローダーが起動します。
ブートローダーの更新お疲れ様でした!
ブートローダー更新後は、tftpではなくflashcpで更新が可能になるため、次回以降の更新は、tftpdサーバは不要になると思います。(純正Debianを起動した場合
新しいブートローダーでは、Image-55以外のLinuxを起動できるようになりました。
しかし初期設定にシリアルコンソールが必要だったりしますので、VisionFive 2にシリアルコンソールは必須だと思います。引き続き取付けておいたほうが良いと思います。
RISC Vはどのような感じでしょうか?
準備ができたところで、最新のLinuxを起動してみましょう?[amazonjs asin=”B07N31JKN2″ locale=”JP” title=”トランセンド microSDカード 128GB UHS-I U3 V30 A2 Class10 (最大転送速度100MB/s) TS128GUSD330S”]
コメントを残す