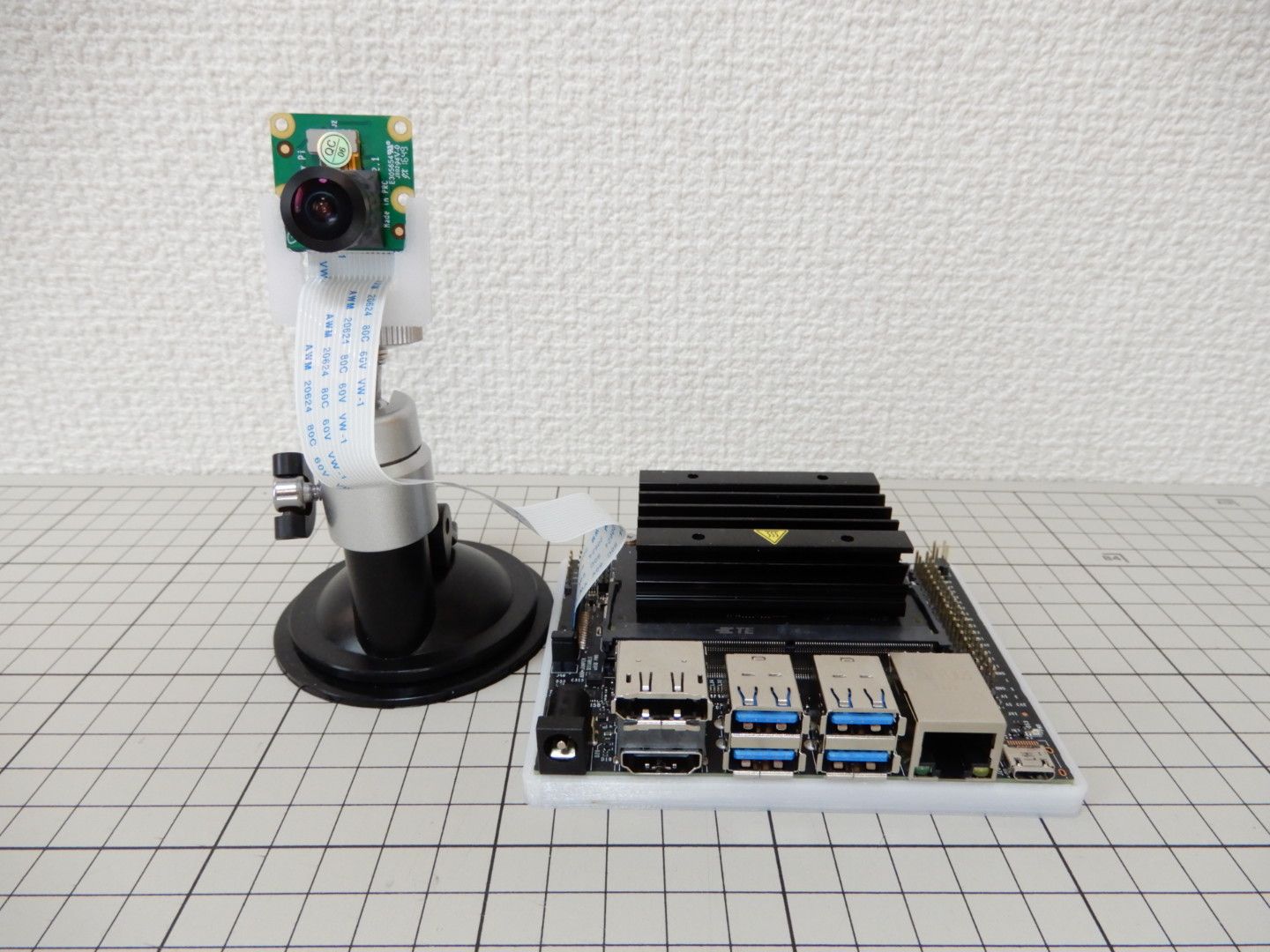
Jetson Nanoにカメラを接続して、映像のリアルタイム画像類推を行う方法を記録しておこうと思います。
Jetson Nanoのjetson-inferenceビルド手順
Jetson NanoにDeveloper Kit SD Card Imageをインストールすると、JetPackが同時にインストールされるようです。
JetPackがインストールされた環境で、jetson-inferenceをビルドすることで、画像ファイル・カメラ映像等の類推(inference)、画像認識やオブジェクト検出等のサンプルプログラムを動かすことができるようです。
jetson-inference情報はこちらのサイトになります。
より詳細な情報を得るために、こちらのサイトをじっくりご閲覧頂くことをお勧め致します。
以下、jetson-inferenceのビルド手順を記載させて頂こうと思いますが、覚書程度のものです。英語の情報ながら、上記のサイトに記載された各種サンプルを実行して頂くことを重ねてお勧め致します。
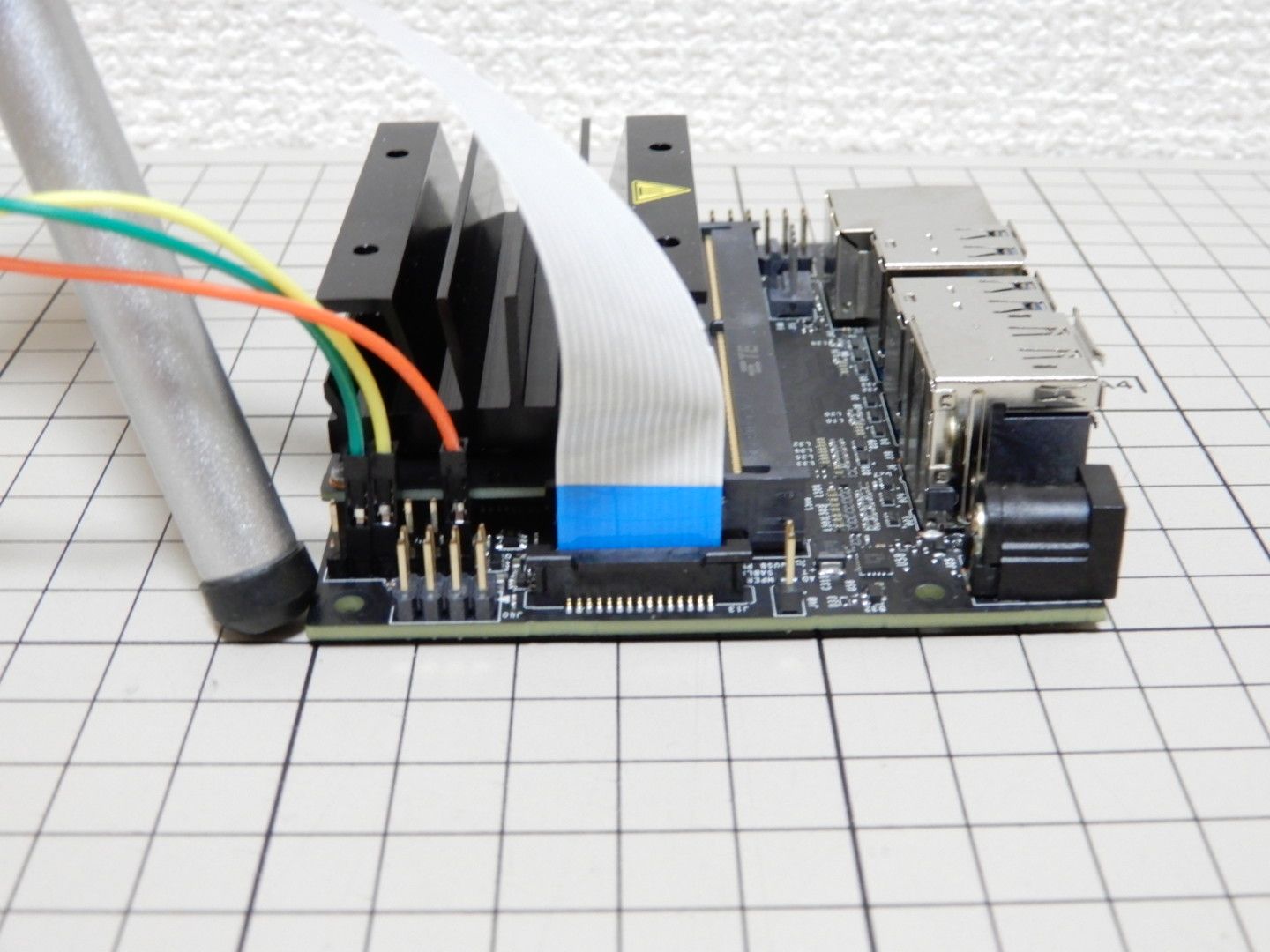
カメラの接続
画像ファイルの類推を行う場合、カメラは必要ありませんが。
可能でしたら、Jetson Nanoにカメラを接続して、リアルタイム類推を行って頂くことをお勧め致します。
カメラの接続手順はこちらの記事になります。
カメラを接続し、GPUを使用致しますので、電源は2Aではなく、4Aを供給することをお勧め致します。
2Aの電源で画像類推を行ったところ、カメラモジュールが破損致しましたので、念の為・・・。
jetson-inferenceのビルド手順
- Jetson Nanoシステムのアップデート・アップグレードを行っておきます。
sudo apt update sudo apt upgrade - ビルドに必要なgit、cmakeをインストールします。doxygenが無いよ?警告が出たため、doxygenもインストールしておきました。
sudo apt install git cmake doxygen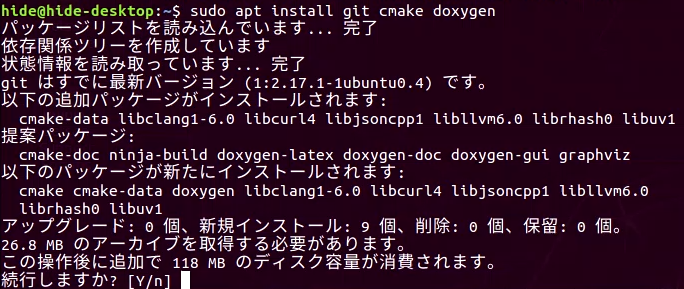
- gitコマンドでjetson-inferenceをcloneします。
git clone https://github.com/dusty-nv/jetson-inference - submoduleをインストールします。
cd jetson-inference git submodule update --init - buildディレクトリを作成し、cmakeします。
mkdir build cd build cmake ../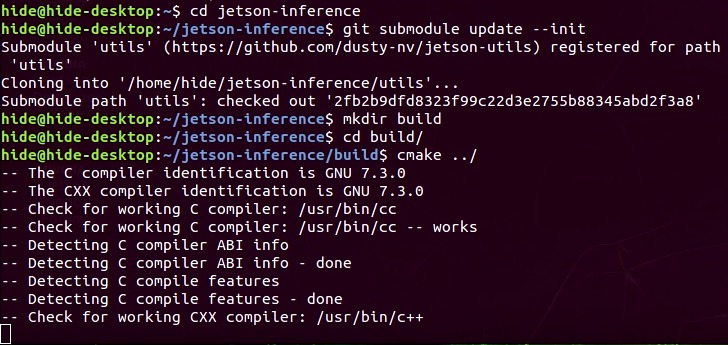 いろいろダウンロードしたり。しばらく待ちましょうか。
いろいろダウンロードしたり。しばらく待ちましょうか。 - makeコマンドでビルド(コンパイル・リンク)します。
make 無事、ビルドできましたでしょうか?
無事、ビルドできましたでしょうか? - カメラ映像のリアルタイム類推を実行しましょう。
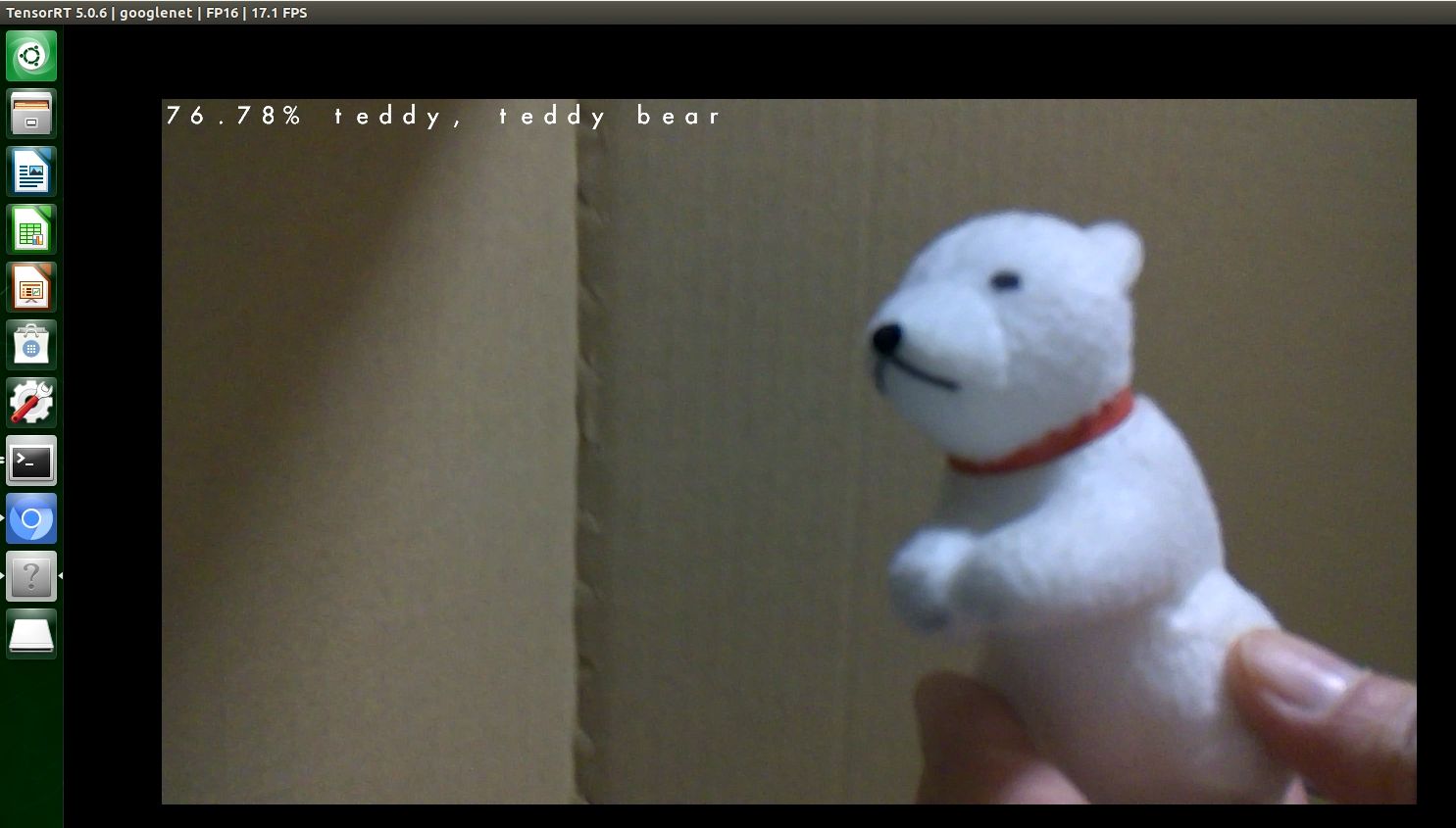
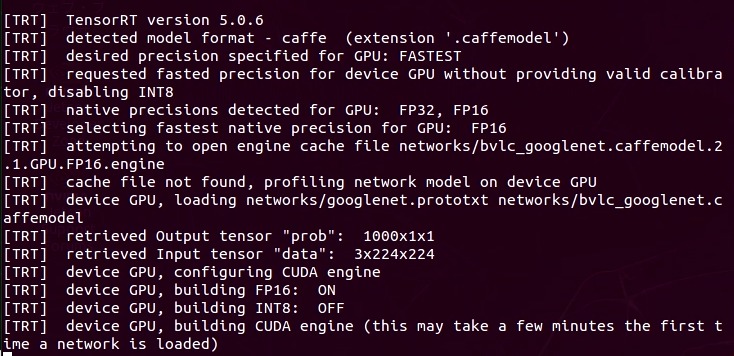
cd aarch64/bin ./imagenet-camera googlenet ./imagenet-camera alexnetCUDAエンジンの初期化にしばらく待ちますが、のんびり待ちましょうね。
以上でJetson Nanoでjetson-inferenceをビルド、imagenet-cameraサンプルを動かすことができました。
カメラ映像を類推することができましたでしょうか? そうですか、Jetson Nanoちゃんは、赤べこはライターに見えますか。
そうですか、Jetson Nanoちゃんは、赤べこはライターに見えますか。
imagenetはImage Recognitionのサンプルかと思います。他にもいろいろサンプルがビルドされているかと思います。
- Image Recognition(画像認識)
- Object Detection(オブジェクト検出)
- Segmentation(形状の抽出)
もしJetson Nanoをご入手されたのでしたら。
ぜひともカメラを接続して、AIを楽しんで頂ければ幸いです。
ちなみに複数オブジェクトのリアルタイム画像認識YOLOの記事はこちらになります。

[amazonjs asin=”B07SDGLZ1H” locale=”JP” title=”Geekworm 40mm DC5V 冷却ファン,NVIDIA Jetson Nano 開発ボード/NVIDIA Jetson Nano メタルケースに適用”]
コメントを残す