 JETSON NANO開発者キットは、MIPI CSI-2規格のカメラモジュールを接続できるそうです。
JETSON NANO開発者キットは、MIPI CSI-2規格のカメラモジュールを接続できるそうです。
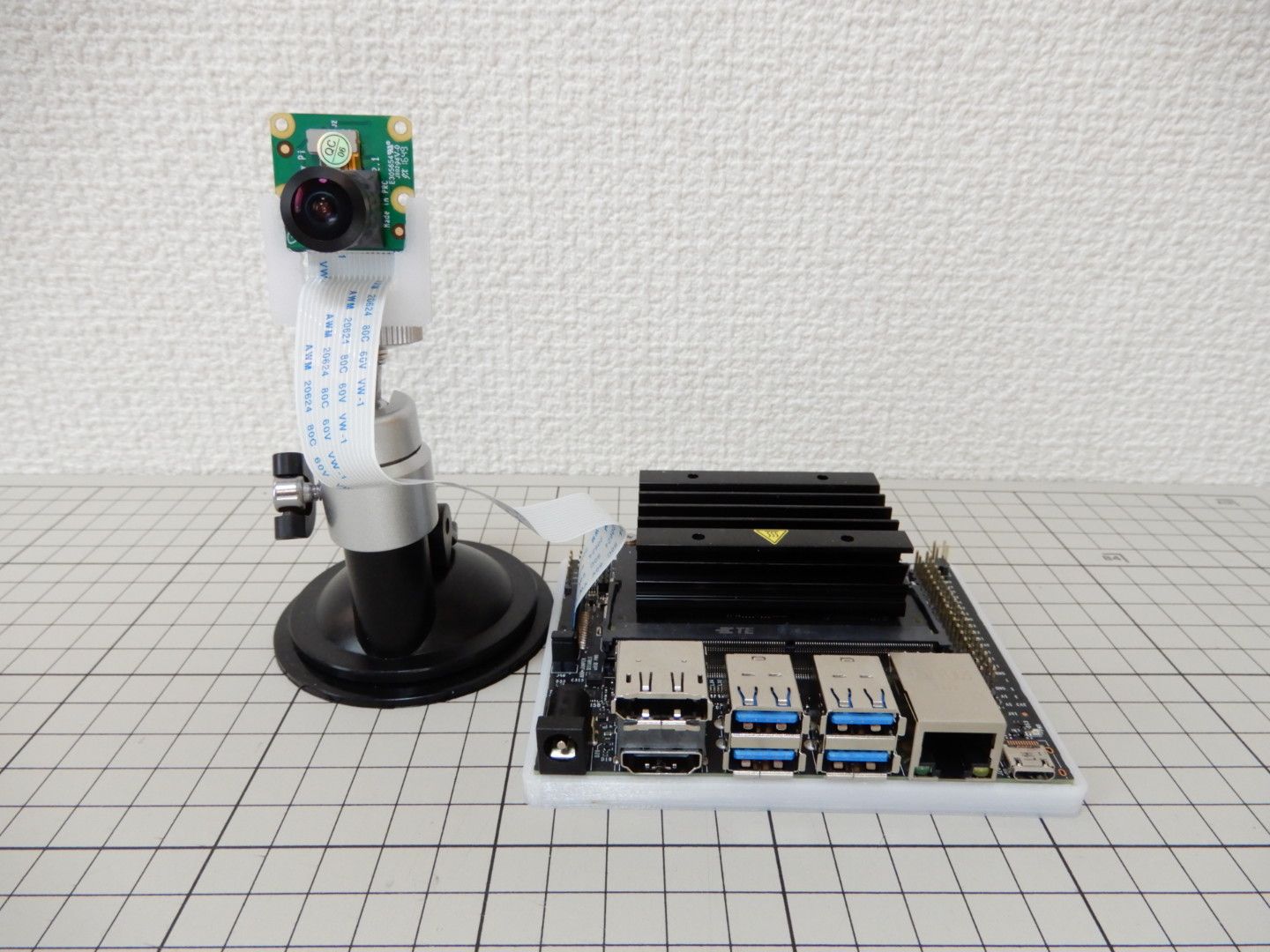
MIPI CSI-2に準拠した、800万画素のRaspberry Pi カメラモジュール V2を接続してみました。
JETSON NANO開発者キットのMIPI CSI-2規格カメラ接続手順
カメラモジュールの接続
[amazonjs asin=”B01F1SWTZE” locale=”JP” title=”Raspberry Pi カメラモジュール【Raspberry Pi Camera V2】”]こちらのカメラモジュールを、このように取り付けてみました。
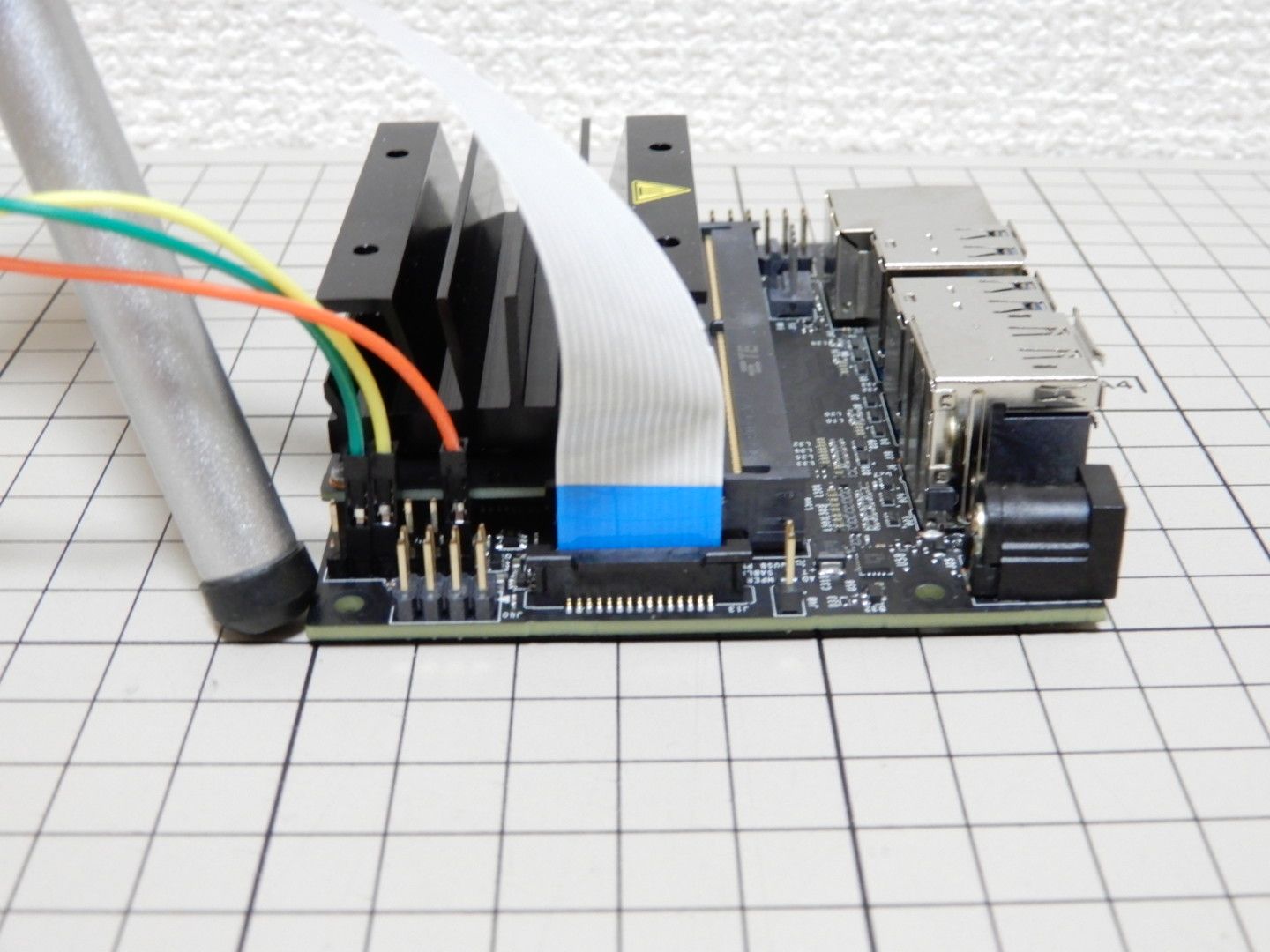
カメラのフラットケーブルは、J13 カメラコネクター端子に接続します。
注意点は3つあります。
- フラットケーブル用のコネクターは折れやすいため、突起部分を少しずつそっと持ち上げて緩める感じです。
- フラットケーブルの向きは、電極側がJETSON NANOのヒートシンク、色のついた側が基板の外側へ向くようです。
- コネクターを締める前に、フラットケーブルが垂直になっていて曲がっていないか確認しましょう。コネクターを締めて、電源を入れる前にもう一度確認を。
正常に認識されると/dev/video0デバイスが作成されるようです。
ls -al /dev/video0![]()
認識されない場合、カメラモジュール側の配線等を確認する必要があります。詳細は、よろしければこちらの記事を御覧ください。
映像の表示
nvgstcaptureコマンドで、映像を表示できるようです。
nvgstcapture
実際の画面は、実行してのお楽しみということで。
ちなみにvnc接続の場合は映像は表示されません。必ずコンソール(HDMIまたはDisplayPortによる出力)で確認する必要があります。
電源は4Aをお勧め致します
最初、2AのUSB電源を使用していましたが、突然、nvgstcaptureを実行しても映像が表示されなくなりました。/dev/video0デバイスは存在しても、nvgstcaptureがフリーズしてしまいます。
故障したカメラモジュールはJetson Nanoでは映像は表示されませんが、Raspberry Piでは表示されたため、最初、Jetson Nanoの故障を疑いました。しかしカメラモジュールを交換したところ、Jetson Nanoで映像が表示されました。
故障の原因はわかりませんが、カメラモジュール交換後は、念の為電源容量を4Aに変更しました。
交換後は、カメラ・Jetson Nanoともに安定して動作しております。
カメラの焦点調整
GPUを搭載したJetsonシリーズということで、カメラでリアルタイム系の処理を行う場合もあるかと思いますが。
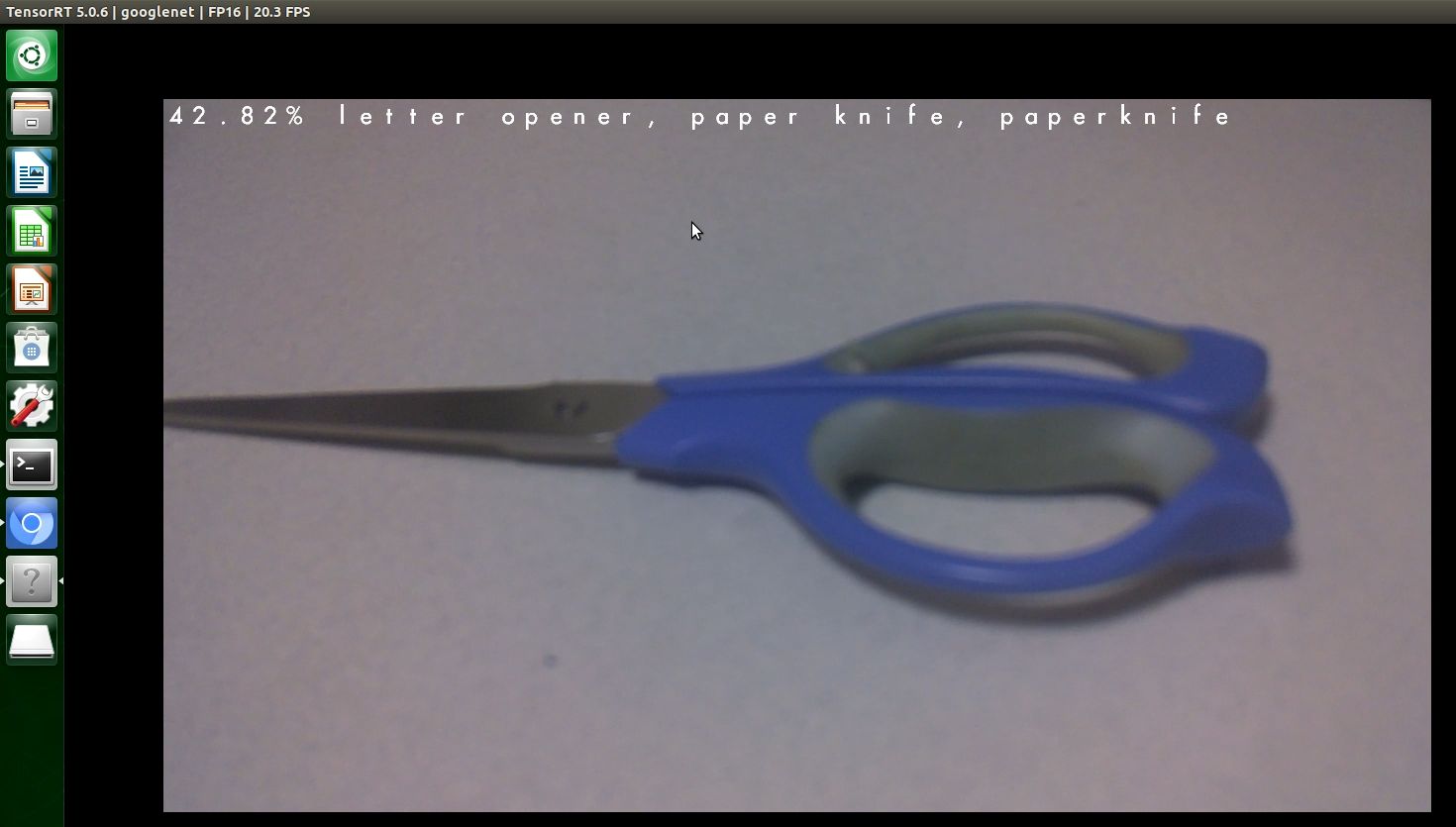 遠景に焦点があっている場合、近くのものを撮影すると、このようにぼやけてしまいます。
遠景に焦点があっている場合、近くのものを撮影すると、このようにぼやけてしまいます。
カメラモジュールは、専用の工具で焦点を調整することができます。以前は工具が販売されていましたが、2019年4月現在は見かけなくなりました。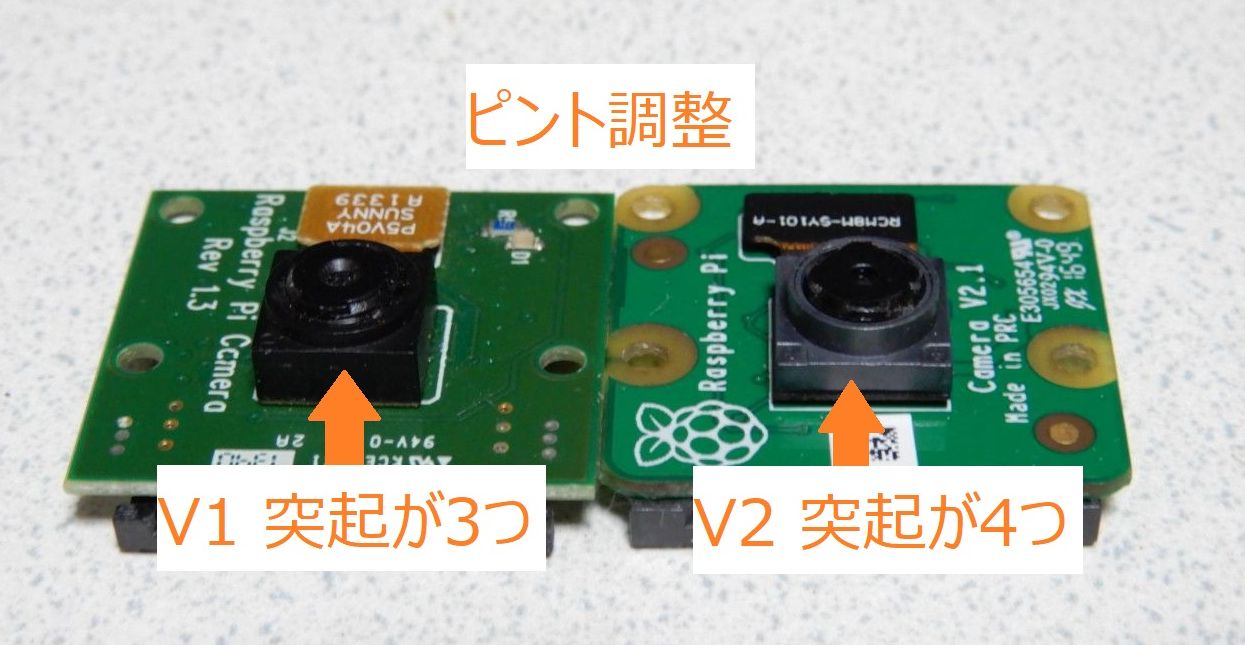
カメラの違いから、工具は2種類存在します。現在は3Dプリンタで工具を作成することが可能のようです。CMOS/CCDモジュール(灰色の正方形の部分)は基板から外れやすいため、レンズを回す際に固定する必要があります。
こちらの記事のFDM方式のプリンタを使用する場合、積層ピッチ0.1mm以下が宜しいようです。(0.2mmの場合は少し難しい感じでした)
焦点の調整をしやすくする例
Jetson Nanoで使用するカメラモジュールはMIPI CSI-2規格の必要があるため、V1カメラモジュール等のCSI-2ではないモジュールは、接続しても認識されませんでした。
このため、MIPI CSI-2規格のカメラモジュールの、CMOS/CCDモジュール部分を交換することで、焦点の調整をしやすくする、という手もあるようです。[amazonjs asin=”B07HMXJ9Y1″ locale=”JP” title=”SainSmart IMX219カメラ モジュール ラズベリー・パイ カメラ ボードV2 8MPセンサー用160度FoV”]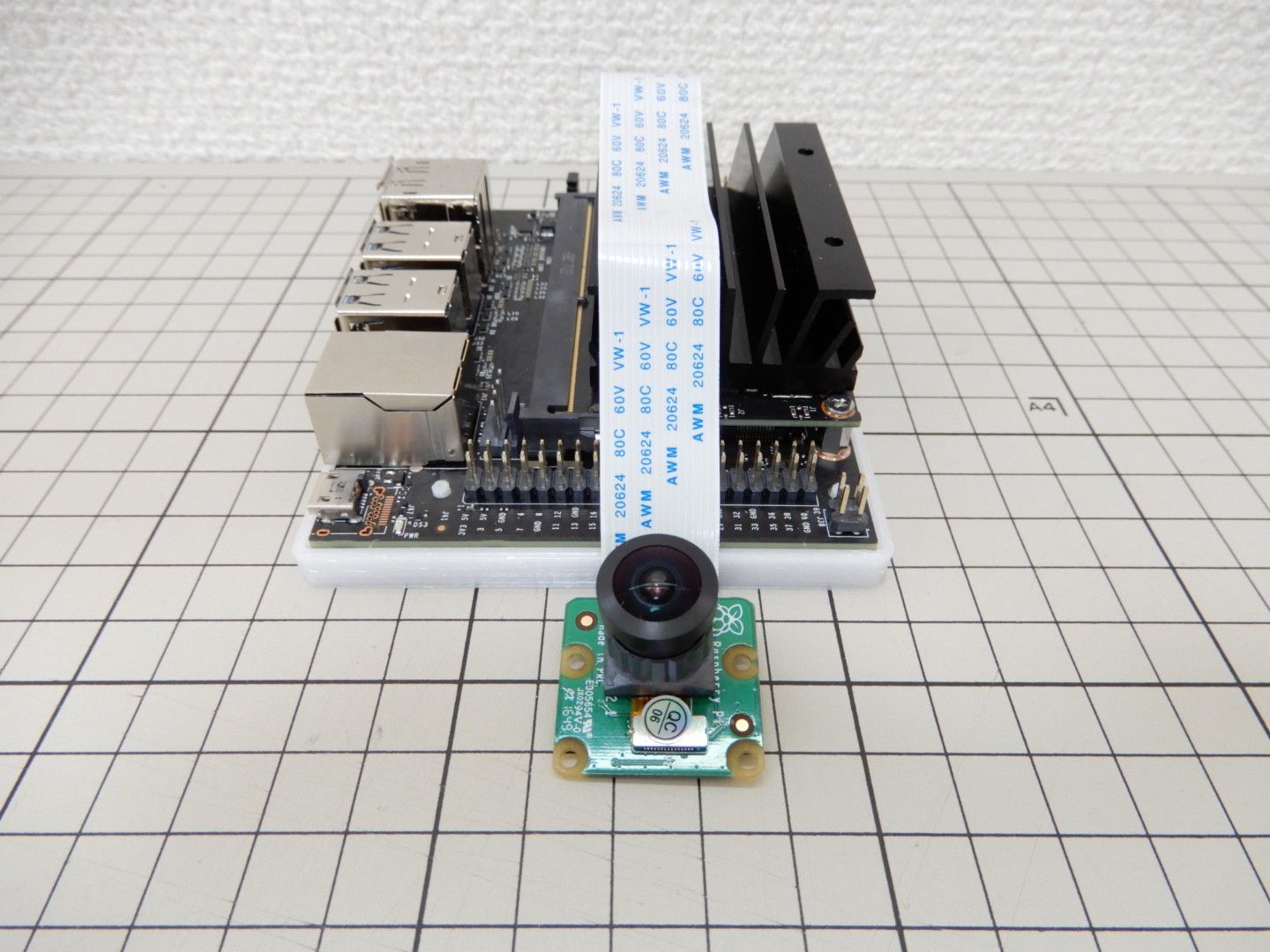 故障したV2カメラモジュールに取り付けたところ、Jetson Nanoでカメラが再度使用できるようになりました。
故障したV2カメラモジュールに取り付けたところ、Jetson Nanoでカメラが再度使用できるようになりました。
こちら160度FoVカメラは、jetbotを作る際の部品の一つのようです。
CMOSモジュール交換時、注意点があります。付属のレンズは魚眼レンズのため、被写体の距離によって画像がゆがむ場合があります。
ゆがみの解消は、レンズはM12マウント規格のため、別の標準・望遠レンズを取り付けることで、適切な画角を得られそうです。写真は35mmの望遠レンズになりますが、M12マウントの場合は画角がずいぶん狭く(かなりの望遠)になります。 [amazonjs asin=”B06X9GZFN8″ locale=”JP” title=”35ミリメートルCCTVのIR MTVレンズm12マウントF2.0のセキュリティビデオカメラ”]具体的な画角は、よろしければこちらの記事を御覧ください。
[amazonjs asin=”B06X9GZFN8″ locale=”JP” title=”35ミリメートルCCTVのIR MTVレンズm12マウントF2.0のセキュリティビデオカメラ”]具体的な画角は、よろしければこちらの記事を御覧ください。
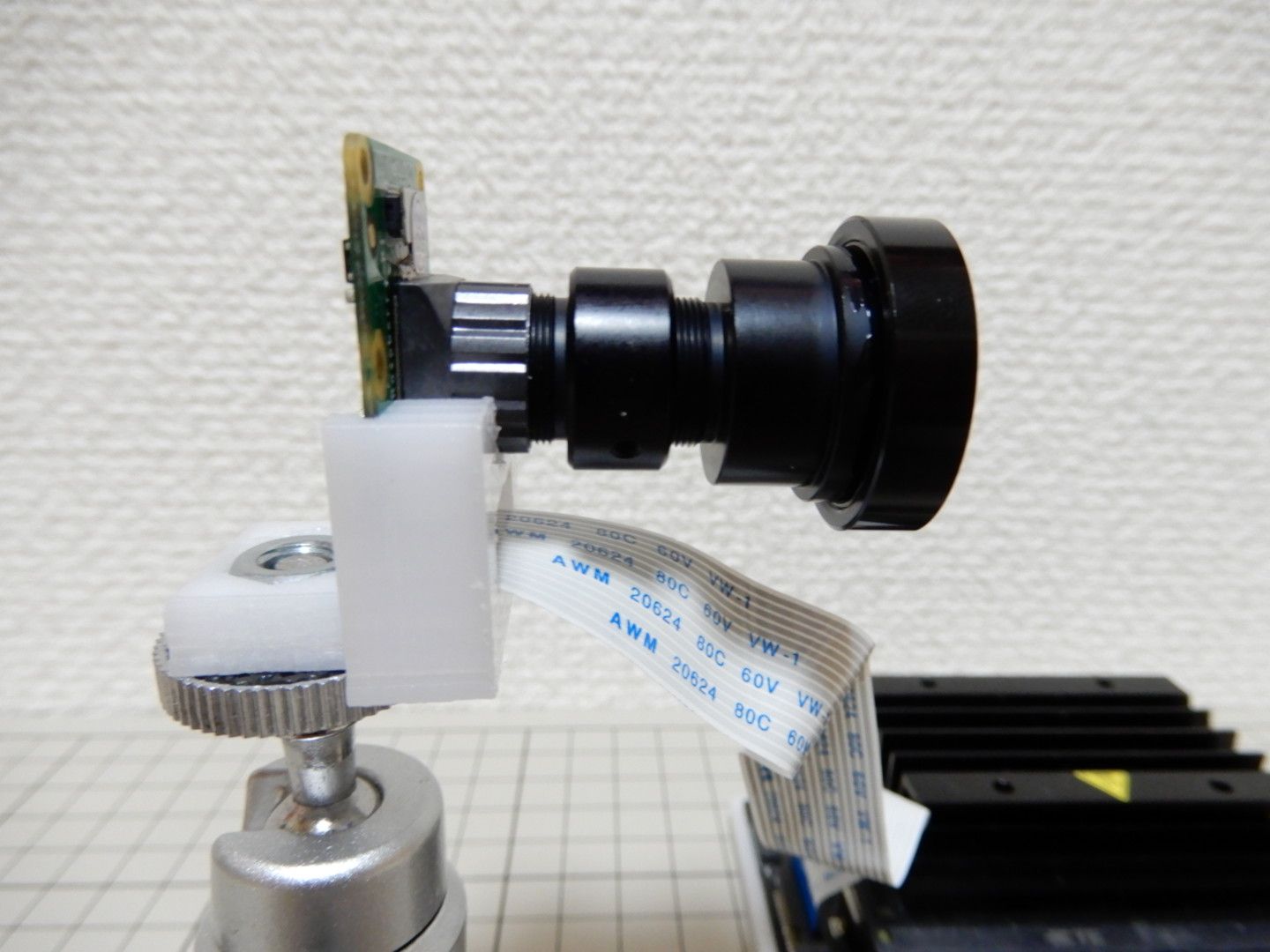
カメラの固定
拙い作品ですが、カメラモジュールを三脚に固定するSTLデータも御座います。

- 【STL】Raspberry Pi カメラモジュール V2を三脚に固定するマウンタ
- 【STL】Raspberry Pi カメラモジュール V2用M12レンズマウントホルダー
- 【STL】Raspberry Pi カメラモジュール V2を直接三脚に固定するケース
オブジェクト認識

Raspberry PiカメラモジュールV2を使ったオブジェクト認識の記事はこちらになります。
[amazonjs asin=”B00YP3NNSO” locale=”JP” title=”ETSUMI デジカメ吸盤君DX 吸盤式ボールヘッド E-6625″][amazonjs asin=”B077FHY65V” locale=”JP” title=”SYNC フラットケーブル ラズベリーパイ 適用 Raspberry Pi カメラモジュール 延長ケーブル 100cm”][amazonjs asin=”B00GSHNDK8″ locale=”JP” title=”NEEWER CN-160 LED ビデオライト 160球のLEDを搭載 Canon、Nikon、Sigma Olympus、Pentaxなどのカメラ&ビデオカメラに対応 【並行輸入品】”][amazonjs asin=”B01J2A4M3O” locale=”JP” title=”ModMyPi ミニカメラスタンド for Raspberry Pi レンズなし”]
コメントを残す