主に材料に関する備忘録です。
- 配線・配電
- コネクタの規格の整理
- 70Cは100Aも流れるんか!何スケのケーブル使えば良いの?スケアじゃなくてAWG?
- 12 AWG無いと怖いですね 3スケ?で良いの?
- 良さげな工具の覚書
ヘキサコプター組み立て覚書
クアッドはよく見ると思いますので。なんとなくヘキサにしてみました。
[amazonjs asin=”B081KYC478″ locale=”JP” title=”Totem Q450 ヘキサコプター ドローンフレーム PDB内蔵”]
ヘキサコプター本体
- フレーム
- ベース
- アーム x6
- GPSマウント
- ブラシレスモーター x6
- ブラシレスモーターコネクタ メス
- Clock Wise(CW)
- モーターから見て時計回り
- 配線 赤/青
- キャップ黒
- Counter Clock Wise(CCW)
- モーターから見て反時計回り
- 配線 白/黒
- キャップ白
- 2212 kv920
- 1時方向 CW
- 11時方向 CCW
- 9時方向 CW
- 7時方向 CCW
- 5時方向 CW
- 3時方向 CCW
- キャップがネジの場合
- 回転方向はネジが締まる方向
- プロペラ x6
- 揚力を生む回転方向
- CW R 黒
- CCW L 白
- 羽1枚の長さ 9450 95mm
- ESP(BSP) スピードコントローラー x6
- Electric Speed Contreoller
- Brushless Speed Controller
- 電源入力:PDB接続側 Deans T端子オス
- 電源出力:ブラシレスモーター側 コネクタオス
- 30A
- 信号入力:フライトコントローラーのOUT側に接続
- 5V?
- 12V?
- フライトコントローラー
- 電源入力: バッテリーから分岐
- 信号入力: プロポセットの受信機、GPS
- 信号出力: スピードコントローラー
- MC(モーションコントロール)はオプション
- カメラマウントのチルト・パン制御用など
- フライトコントローラー用電源ケーブル
- リポバッテリーとPDBの間に入れる
- 電源入力:XT60オス
- 電源出力:XT60メス
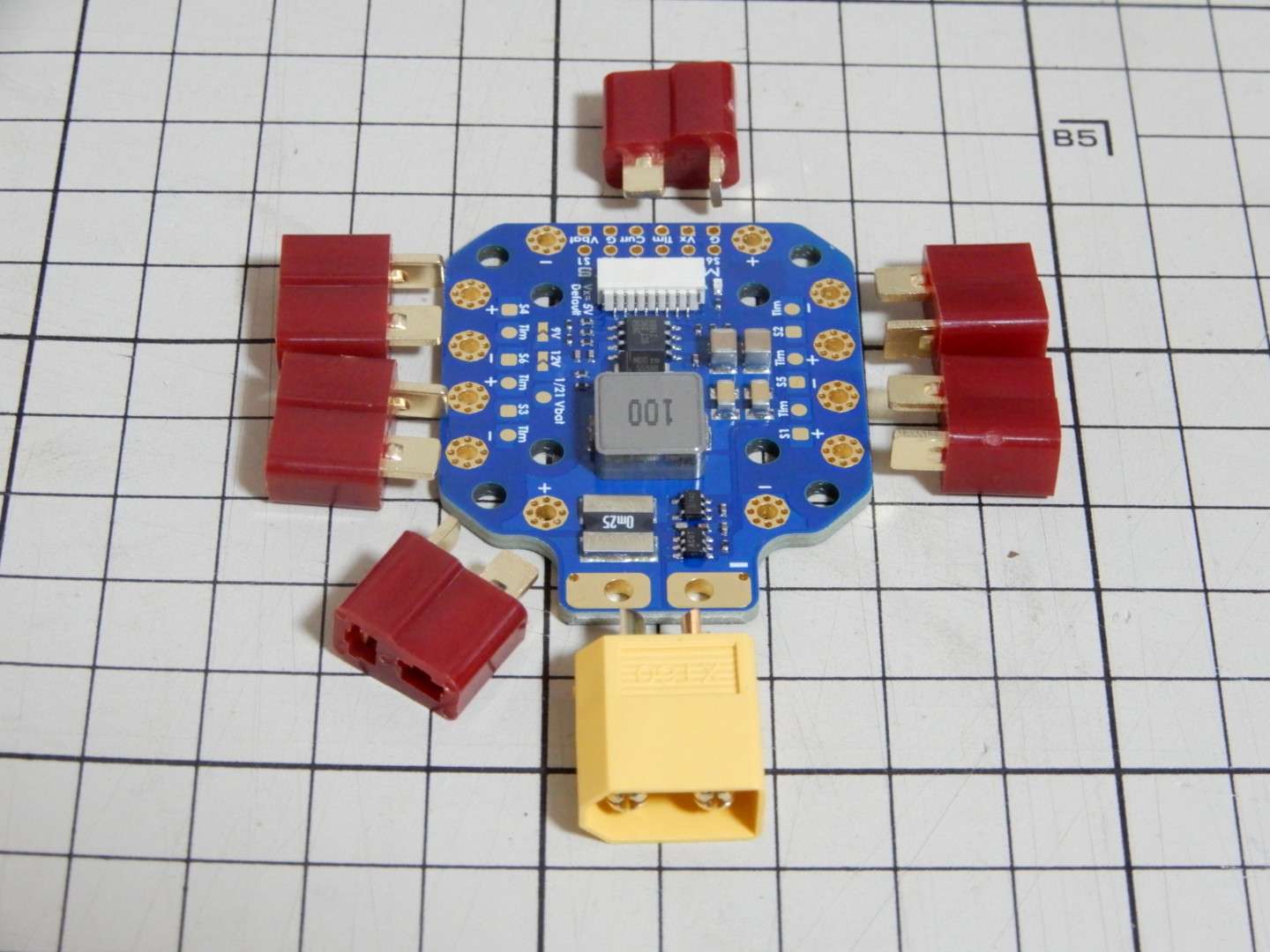
- PDB 分電基板
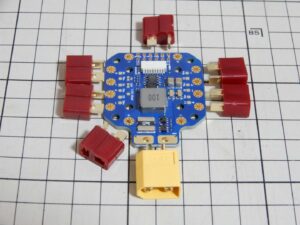
- Power Distribution Board
- 電源入力: リポバッテリー接続 XT60オス
- 電源出力: ESP接続端子 Deans T端子メス x6
- PDBが基板ではなくフレームのベースの場合も
- ノイズ対策が課題
- バッテリー残量検出機能: フライトコントローラー?別途チェッカー接続?
- GPS
- フライトコントローラーに接続 DF13コネクタ
- プロポセット
- 送信機
- 技適対応かどうか確認しましょう
- 屋外対応 2.4GHz
- 6CH
- エルロン
- エレベーター
- スロットル
- ラダー
- MC 1(パン)
- MC 2(チルト)
- フライトコントロラーのIN端子に接続
- 受信機
- 操作する側
- 送信機
- テレメトリー
- ドローンの状態を送信する
- Bluetooth / Wi-Fi
- バッテリーチェッカー
- 残量表示
- LiPoバッテリーのバランス端子に接続
- 大きな音が鳴ってびっくりする
- リポバッテリー
- XT60メス
- バランス端子はセル数により異なる
- リポ充電器
- バランス端子から充電
- PSEマークを確認
スピードコントローラー
6 in 1
- 1枚の基盤に複数のESCをまとめたもの
- 100g以下の機体向けは15A程度
- 大型の機体は、それなりに大きな電流が必要のため、基盤も大きい
モーターごと
フライトコントローラー
100g以下の機体向けの小型のものと、100g以上向けで分かれる感じでしょうか。
Autopilotを採用したオープンハードウェアの一部の覚書です。どれかを入手したいのですが、安いお買い物では無いため、性能・扱いやすさとともに価格が問題になりそうです。
Pixhawk 6C /6C Mini
- Main Processor: STM32H7
Pix32 v5
- Main Processor: STM32F765
Pixhawk 6X
- Main Processor: STM32H7
The Cube Module
[blogcard url=”https://docs.cubepilot.org/user-guides/autopilot/the-cube-module-overview”]
Pixhawk4
- 終息(製造終了)の製品
- Main Processor: STM32F765
Pixhawk 3 Pro
- 終息(製造終了)の製品
- Main Processor: STM32F469
APM2.6
- 終息(製造終了)の製品
- Main Processor: ATmega2560
LiPoバッテリーの選択基準
 こちらは8S(セル)まで対応した、LiPoバッテリー電圧チェッカー・低電圧ブザーアラームになります。
こちらは8S(セル)まで対応した、LiPoバッテリー電圧チェッカー・低電圧ブザーアラームになります。
8セルの場合30Vですか・・・手元には御座いません。3セル=11.1V、4セル=14.8Vあたりが一般的でしょうか?
LiPoバッテリーを選択する基準は、このあたりかと思います。
- コネクタ
- XT60メス
- セル数 S ⇒電圧
- 2セル=7.4V
- 3セル=11.1V
- 電源容量 mAh
- 1500mAh、5000mAhなど
- 一時間あたりに流せる電流の大きさ。
- 大きいほど長持ちしますが、重くなるのでなんとも。
- Cレーティング
- 流せる電流の許容量 電源容量にかけると電流(A)になる?
- 電源容量(1500mAh) x Cレート(1) = 1.5A
- 30C 1500mAh = 45A
- 70C 1500mAh = 105A
- 重量
迷うところは、Cレーティングでしょうか。
30AのESCを使用する場合。逆算すると 1500mAhの容量の場合
- 30/(1500/1000)=30/1.5=20C
のバッテリーを選択する必要がある計算でしょうか。(初心者
- 20C以下では30Aに届かず、回転率の上昇が遅い。負荷をもっとかけられる。性能不足。
- 20C以上では30A以上の電流が流れる。過負荷。危険。
このような感じで、電源容量とESPのスペックから「ESP 1つあたり」は計算できましたが。
実際は、同時に複数のESPを稼働するため、20Cでは性能不足になりそうです。
たとえば同時にフルスピードになるスピードコントローラーが4つの場合、20×4=80Cになる感じでしょうか?(推測[amazonjs asin=”B08ZCRTK3H” locale=”JP” title=”SIGP 5Sリポバッテリー5000mAh 18.5V 80Cソフトパックfor RCヘリコプター飛行機FPVドローンクワッドコプターレーシングホビー”]
FPV・カメラ
- 要件
- PDBから電源が取れるもの
- ノイズを発生しないもの
- 軽量
- 記録方式
- Wi-Fi等で電波で飛ばす
- microSDカード等のストレージに記録する
- カメラ仕様
- 焦点距離
- 画角
- 明るさ
- 解像度(2K, 4K、画素数)
- 動画の場合フレーム数
- APM telem portケーブル
- Minim OSD(On Screen Display)
- FPVドローン映像でよく見るキャプションは、こちらで作られているのですね。
- テレメトリー(遠隔操作)データの表示
- FPVカメラ
- トランスミッター
初期のラジコン覚書
- バッテリーはNi-Cd 7.2V
- プロポセットの周波数 AM27MHz、FM27MHz、FM 40MHz帯、72MHz帯
- →2.4GHz帯へ
- クリスタルを交換してチャンネルを変えていた気がします
- 機体の制御はRCサーボモーター
- ステアリングはそのまま
- FETスピードコントローラー
- リニア方式
- PWM方式
- リニア方式より前、FET以前はサーボモーターでスイッチングしていた記憶が
- 機体の動力は汎用DCモーター(ブラシモーター)
本記事は随時更新致します。
[amazonjs asin=”B0BGLHHVLD” locale=”JP” title=”FEICHAO 直径16mm モーターマウントクランププレートホルダー 多軸クランプ ユニバーサル多軸モーター RCヘキサコプター用 (1個 ブラック)”]
コメントを残す